| Maksimum Menzil | 4m |
| Minimum Menzil | 3cm |
| Çalışma Voltajı | 5V DC |
| Görme Açısı | 15 Derece |
| Çektiği Akım | 15mA |
| Tetik Bacağı Giriş Sinyali | 10us TTL |
| Echo Çıkış Sinyali | Giriş TTL Sinyali ve Mesafe Oranı |
| En | 54.48mm |
| Boy | 31.42mm |
| Vida Delik Çapı | 3.2mm |
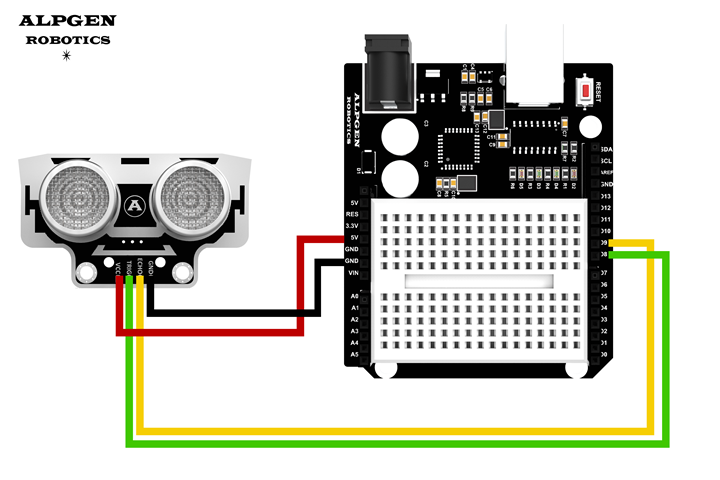
| Ultrasonik Mesafe Sensörü Modülü | Arduino Uno Breadboard |
| GND | - |
| VCC | 5V |
| TRIG | D8 |
| ECHO | D9 |
Örnek Proje Arduino Kodu
/* ALPGEN Robotics */// Ultrasonik Sensör ile Mesafe Ölçme// 07.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com// www.alpgenrobotics.com *//inttrigPin= 8;// trigPin Dijital 8 pine tanımlandıintechoPin=9;// echoPin Dijital 9 pine tanımlandılongzaman; // zaman adında değişken tanımlandılongmesafe; // mesafe adında değişken tanımlandıvoidsetup() // Başlangıç Ayarlamaları{ pinMode(trigPin,OUTPUT);// trigPin çıkış olarak ayarlandı pinMode(echoPin,INPUT); // echoPin giriş olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı}voidloop()// Sürekli Tekrar Edecek Olan Döngü{ digitalWrite(trigPin,LOW); // trigPin durumu LOW yapıldı delayMicroseconds(5); // 5us gecikme süresi digitalWrite(trigPin,HIGH); // trigPin durumu HIGH yapıldı delayMicroseconds(10); // 10us gecikme süresi digitalWrite(trigPin,LOW); // trigPin durumu LOW yapıldı zaman=pulseIn(echoPin,HIGH);// echoPin HIGH olana kadar geçen süre zaman değişkenine atandı mesafe=(zaman/29.1)/2; // Ölçülen zaman mesafeye çevrildi Serial.print("Uzaklik "); // Arduino'nun seri ekranına "Uzaklık" yazdırıldı Serial.print(mesafe); // Ekranda uzaklık kelimesinden sonra ölçülen mesafe değişkeni yazdırıldı Serial.println(" cm"); // En son cm yazdırılarak "println" komutu ile satır aşağı kaydırıldı delay(500); // Verilerin ekrana yazdırılma süresi = 500ms}