-400x400.jpg "Kar Board: DHT11 Sıcaklık ve Nem Ölçüm")
Kar Board: DHT11 Sıcaklık ve Nem Ölçüm
Kısa Açıklama
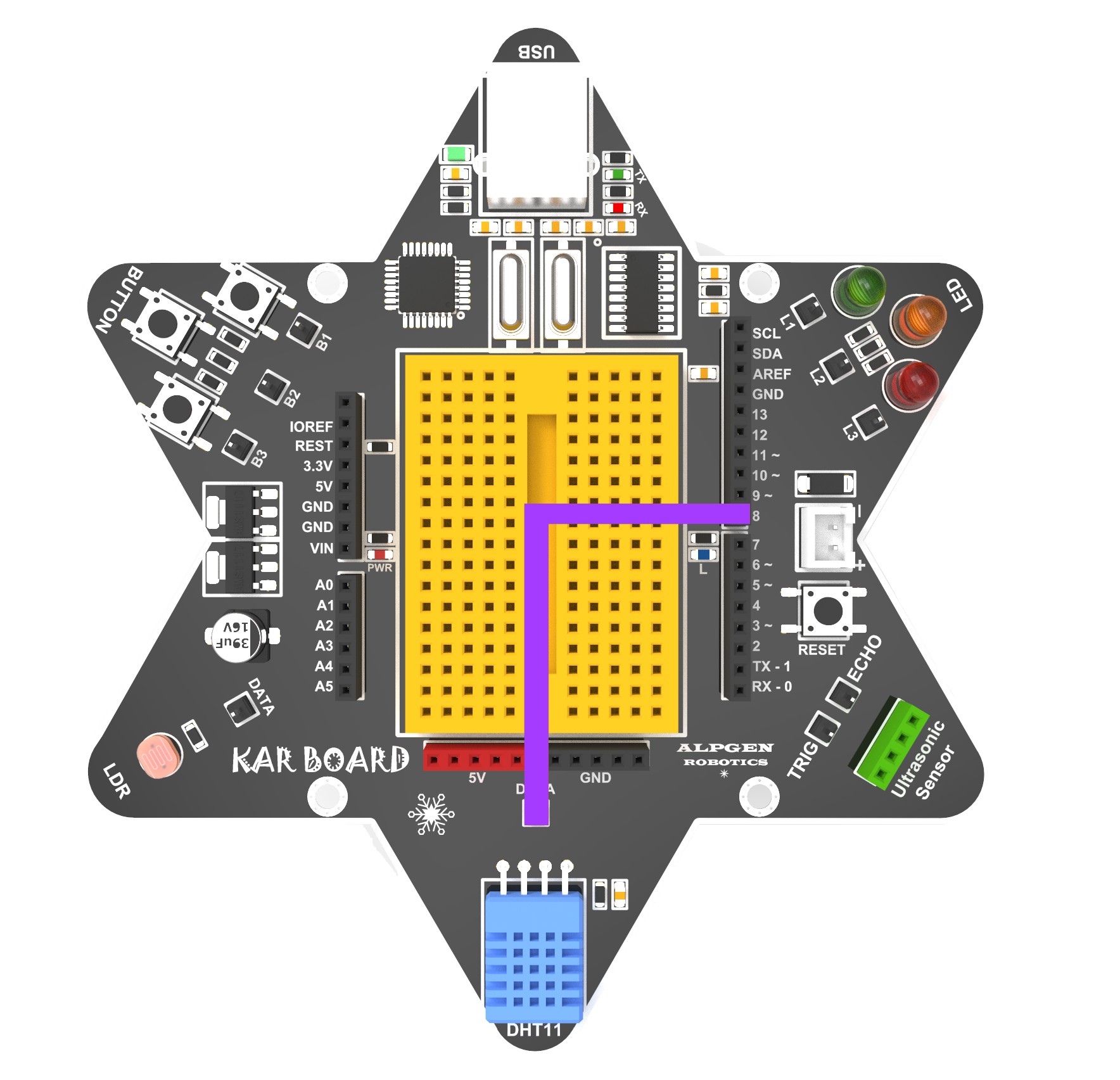
Bu uygulamada Kar Board kullanarak, DHT11 sıcaklık ve nem sensörü ile ortamın sıcaklık ve nem değerini mBlock'ta yazdığımız kod ile ölçeceğiz. Ölçtüğümüz değerleri ise Arduino IDE uygulamasının seri ekranından inceleyeceğiz.
Kar Board üzerinde DHT11 sıcaklık ve nem sensörü dahili olarak bulunduğu için devre kurmanız gerekmez. Sensörün data pinini dijital pinlerden dilediğinize takabilirsiniz. Ancak seri porttan veri okuyacağımız için 0 ve 1 pinini kullanmamalısınız. Bu uygulamada DHT11 pini 8. pine bağlanmıştır.
Devre Şeması
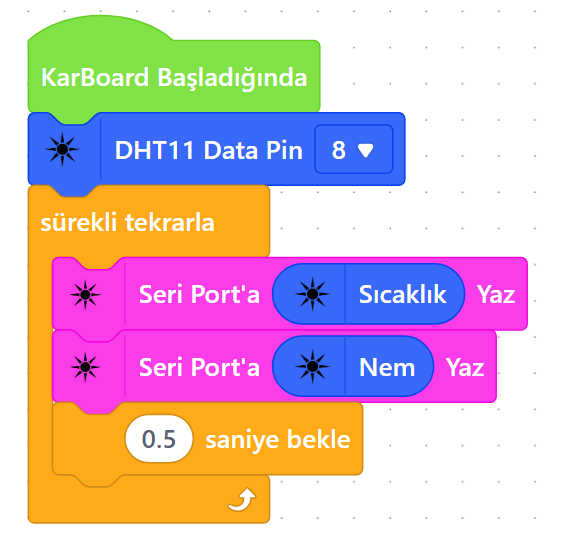
mBlock Kodu
Kodumuzu Kar Board'a yükledikten sonra mBlock üzerinde bağlantımızı kesip Arduino IDE'yi açıyoruz.
Arduino IDE üzerinde Araçlar > Port sekmelerinden ilgili portu seçerek sağ tarafta bulunan Seri Ekran ( imleç ikonu ) açıyoruz. Alt sekmeden baudrate hızını 9600 seçmeyi unutmayın.
Destek Ürünleri
")
")
Catduino Nedir?Catduino Arduino tabanlı kodlama setidir. Arduino Uno gibi kodlayabilirsiniz. Catduino tümleşik yapısı sayesinde robotik projelerinizi kablo karmaşası yaşamadan yapabilmenizi sağlar. Catduino üzerinde dahili L298N motor sürücü modülü bulunmaktadır. Ayrıca robotik projelerniz için ultrasonik sensör, bluetooth modülü ve servo motor girişleri bulunmaktadır.Nasıl Kodlanır?Catduino'yu Arduino Uno kullanır gibi kodlayabilirsiniz. İster Arduino IDE'e C dilinde ister mBlock ile sürükle-bırak kodlama yapabilirsiniz.Arduino IDE İle C-Tabanlı KodlamaCatduino'yu Arduino IDE ile kodlayabilmek için üst menüden Araçlar > Board > Arduino Uno seçmelisiniz. Ayrıca Catduino bilgisayarınıza bağlı iken Port seçeneği aktif olacak ve Catduino'nun bağlı olduğu COM portu seçmelisiniz. Artık kodunuzu yazarak yükle butonu ile kodunuzu Catduino'ya yükleyebilirsiniz.MBlock İle Blok Tabanlı KodlamamBlock sürekle-bırak kodlama platformudur. Bu platformc C dilinden önce kodlamanın mantığını anlayabilmek ve projeler geliştirebilmek için oldukça kullanışlıdır. 7 8 yaş ve üzeri her birey mBlock ile kodlama yapabilmektedir. mBlock ile Catduino'yu kodlayabilmek için Aygıtlar > Catduino veya Aygıtlar > Arduino Uno seçmeniz yeterlidir.Catduino ile Neler Yapılabilir?Catduino Arduino Uno ile yapılabilen projeleri kolaylaştırmak için tasarlanmıştır. Örneğin robotik projelerinizde Catduino ile;Engelden Kaçan RobotÇizgi İzleyen RobotBluetooth Kontrollü Robotprojelerini kolayca, minimum kablo kullanarak yapabilirsiniz.Catduino Set İçeriği:Catduino Kodlama Kartı2x DC Motor (RJ Soketli)2x Geçmeli TekerlekSarhoş Tekerlek10x Jumper KabloUSB Kablo..
Sepete Ekle

JOYBOARD ROBOTİK KODLAMA SETİ Nedir? JoyBoard; herhangi bir kodlama bilgisi gerektirmeden, klavyegibi kullanılabilen temel iletkenlik kartıdır. JoyBoard ilebilgisayarınızdan müzik çalabilir, yazı yazabilir, oyunoynayabilirsiniz. Ayrıca Scratch gibi kodlama platformlarındankendi oyununuzu geliştirebilir ve geliştirdiğiniz oyunları JoyBoardile oynayabilirsiniz. Bu sayede yazılım ve algoritma bilgilerinizigeliştirebilirsiniz. Önemi? JoyBoard ile robotik kodlamanın temellerini erken yaştaöğrenme imkanına sahip olabilirsiniz. JoyBoard, okul öncesidönemde çocukları eğlendirirken merak etmelerini desağlamaktadır. İlkokul düzeyindeki çocuklar ise Scratch ilesürükle-bırak kodlamaya geçerek kodlama öğrenmeyebaşlayabilirler. Nasıl Kullanılır? Örnek Proje Kitapçığı JoyBoard set içeriğinde kullanım kılavuzu bulunmaktadır. Kullanma kılavuzu ile birlikte eğlenerek robotik kodlama projeleri yapabilirsiniz. Set İçeriği ..
Sepete Ekle
Catduino lehim seti ile temel elektronik komponentlerin lehimlemesini kolayca yapıp devrenizi çalıştırabilirsiniz. Ayrıca kart üzerinde ki bilgiler sayesinde seri paralel devre özelliklerini öğrenebilirsiniz.Set İçeriği;15 adet 1Kohm direnç1 adet 7805 voltaj regülatörü1 adet DC güç girişi2 adet yeşil LED1 adet kırmızı LED2 adet push buton 9V Pil + Bağlantı KablosuDevre tamamlandıktan sonra karta 9V pil takarak butonlara basıldığında yeşil ledlerin yandığını gözlemleyebilirsiniz...
Sepete Ekle

TRAFİK IŞIĞI MODÜLÜTrafik ışığı modülü üzerinde kırmızı, yeşil ve sarı renklerde olmak üzere 3 adet led bulunduran modüldür. Modül, trafik ışığı şeklinde tasarlanmıştır. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde akıllı trafik uygulaması vb. birden fazla led kullanımı gerektiren projelerde kullanılabilir.Led5mmEn36.02mm Boy56.43mm Vida Delik Çapı3.2mm Örnek Proje Devre ŞemasıBu projede trafik ışığı modülü üzerindeki kırmızı, sarı ve yeşil LED aynı anda 1'er saniye arayla yanıp sönecektir. Projede trafik ışığı modülü ile Arduino Uno Breadboard kullanılmıştır.Trafik IşığıArduino Uno Breadboard-GNDR5Y6G7Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Trafik Işığı Modülü Kullanımı Örnek Proje // 06.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int red = 5; // Kırmızı Led Dijital 5'e tanımlandı int yellow = 6; // Sarı Led Dijital 6'ya tanımlandı int green = 7; // Yeşil Led Dijital 7'ye tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(red, OUTPUT); // pinMode(yellow, OUTPUT); // Ledler Çıkış Olarak Ayarlandı pinMode(green, OUTPUT); // } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(red, HIGH); // Kırmızı Led durumu HIGH yapıldı (led yandı) digitalWrite(yellow, HIGH); // Sarı Led durumu HIGH yapıldı (led yandı) digitalWrite(green, HIGH); // Yeşil Led durumu HIGH yapıldı (led yandı) delay(500); // 500ms gecikme süresi (ledlerin yanma süresi) digitalWrite(red, LOW); // Kırmızı Led durumu LOW yapıldı (led söndü) digitalWrite(yellow, LOW); // Sarı Led durumu LOW yapıldı (led söndü) digitalWrite(green, LOW); // Yeşil Led durumu LOW yapıldı (led söndü) delay(500); // 500ms gecikme süresi (ledlerin sönme süresi) } ..
Sepete Ekle

ARDUINO UNO BREADBOARDUNO BreadBoard, 8 yaş ve üzeri herkesin rahatlıkla kullanabileceği robotik kodlama kartıdır. Hobi amaçlı, eğitim amaçlı veya profesyonel amaçlı farklı alanlarda projeler geliştirmek için kullanılabilir. IoT projeleri, robot projeleri, Arduino projeleri ve akıllı sistemler gibi pek çok proje UNO BreadBoard ile kolaylıkla gerçekleştirilebilir. Üzerinde bulunan mini breadboard, devre bağlantılarının daha kolay yapılmasını sağlar.Arduino ile kodlanabilen tüm sensör ve modüller UNO BreadBoard ile kullanılabilir.Arduino tabanlı olan UNO BreadBoard; Arduino IDE, mBlock gibi açık kaynak programlar ile kodlanabilir.TEKNİK ÖZELLİKLERI/O Pins14 Dijital (6'sı PWM) , 6 Analog PinMikroişlemciAtmega328Çalışma Gerilimi5VGiriş Gerilimi7-15VHer I/O için Akım40mAFlash Hafıza32KBSRAM2KBEEPROM1KBSaat Hızı16MHzÖlçüler68.96mm x 58.93mmNASIL KULLANILIR?Üzerinde bulunan USB giriş ile bilgisayara bağlanır. Hazırlanan kod bloğu/satırı USB bağlantısı yapıldıktan sonra karta yüklenir. Devre bağlantıları da tamamlandıktan sonra devre çalıştırılarak proje gözlemlenir.NASIL KODLANIR?UNO BreadBoard üzerindeki mikroişlemci sayesinde bilgisayar üzerinden kolayca kodlanabilmektedir. Yaygın kullanılan kodlama platformları ile uyumludur. Hem Arduino IDE üzerinde C ile hem de blok tabanlı kodlama platformlarından kodlanabilmektedir.Arduino, Arduino IDE adı verilen kodlama platformuyla kullanılmaktadır. Robotik kodlama ürünlerinin birçoğu Arduino ile kodlanabilmektedir. C dili temeline dayanan bu kodlama platformunda, cihaz türünü Arduino UNO seçerek UNO BreadBoard’u dilediğiniz gibi kodlayabilirsiniz. ÖRNEK PROJE ARDUINO IDE KODU /* ALPGEN Robotics */ // Arduino Uno BreadBoard 13. Pin Dahili Led Blink // 06.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 13; // Led Dijital 13'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // Led Çıkış Olarak Ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(led, HIGH); // Led durumu HIGH yapıldı (led yandı) delay(500); // 500ms gecikme süresi (ledin yanma süresi) digitalWrite(led,LOW); // Led durumu LOW yapıldı (led söndü) delay(500); // 500ms gecikme süresi (ledin sönme süresi) } ..
Sepete Ekle

HC-SR04 ULTRASONİK MESAFE SENSÖRÜ MODÜLÜArduino geliştiricileri arasında en popüler olan uzaklık sensörüdür. 4 metreye kadar uzaklıkları ölçebileceğiniz bu sensör 5V ile çalışmaktadır. 15mA akım çeken bu sensör ses dalgalarının gidip gelme süresini ölçerek mesafeyi ölçme prensibi ile çalışır. Uygun fiyatı ve yüksek doğruluk oranı ile bu sensörü mesafe ölçüm projelerinizde rahatlıkla kullanabilirsiniz.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde oldukça sık kullanılan HC-SR04 ultrasonik sensör modülü ile engelden kaçan robot yapılabilir, boy ölçme projesinde kullanılabilir, araç park sensör projesi veya radar projesi gibi çeşitli uygulamalar yapılabilir.Maksimum Menzil4mMinimum Menzil3cmÇalışma Voltajı5V DCGörme Açısı15 DereceÇektiği Akım15mATetik Bacağı Giriş Sinyali10us TTLEcho Çıkış Sinyali Giriş TTL Sinyali ve Mesafe OranıEn54.48mmBoy31.42mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede ultrasonik mesafe sensörü modülü kullanılarak sensörün okuduğu değer seri porta "cm" olarak yazdırılacaktır. Projede HC-SR04 ultrasonik sensör modülü ile Arduino Uno Breadboard kullanılmıştır.Ultrasonik Mesafe Sensörü ModülüArduino Uno BreadboardGND-VCC5VTRIGD8ECHOD9Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Ultrasonik Sensör ile Mesafe Ölçme // 07.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// int trigPin = 8; // trigPin Dijital 8 pine tanımlandı int echoPin = 9; // echoPin Dijital 9 pine tanımlandı long zaman; // zaman adında değişken tanımlandı long mesafe; // mesafe adında değişken tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(trigPin, OUTPUT); // trigPin çıkış olarak ayarlandı pinMode(echoPin,INPUT); // echoPin giriş olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(trigPin, LOW); // trigPin durumu LOW yapıldı delayMicroseconds(5); // 5us gecikme süresi digitalWrite(trigPin, HIGH); // trigPin durumu HIGH yapıldı delayMicroseconds(10); // 10us gecikme süresi digitalWrite(trigPin, LOW); // trigPin durumu LOW yapıldı zaman = pulseIn(echoPin, HIGH); // echoPin HIGH olana kadar geçen süre zaman değişkenine atandı mesafe= (zaman /29.1)/2; // Ölçülen zaman mesafeye çevrildi Serial.print("Uzaklik "); // Arduino'nun seri ekranına "Uzaklık" yazdırıldı Serial.print(mesafe); // Ekranda uzaklık kelimesinden sonra ölçülen mesafe değişkeni yazdırıldı Serial.println(" cm"); // En son cm yazdırılarak "println" komutu ile satır aşağı kaydırıldı delay(500); // Verilerin ekrana yazdırılma süresi = 500ms } ..
Sepete Ekle

BUTON MODÜLÜButon modülü üzerinde 1 adet basmalı buton bulunan, butona basıldığında da dijital çıkış veren bir modüldür. Dijital çıkıştan butona basılıyken 1, basılı değilken 0 değeri alınır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıkça kullanılan modüldür. Buton ile led kontrolü, motor hız ve yön kontrollerinde, led parlaklığı ayarlama vb. projelerde kullanılabilir. En35.45mmBoy42.26mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede buton modülü ile Arduino Uno Breadboard kullanılarak butona basıldığında ledin yanması kodlanmıştır.Buton ModülüArduino Uno BreadboardDATAD5-GND+5Vpinlerine bağlanmıştır.Örnek Proje Arduino Kodu /* ALPGEN Robotics */ //* Buton Modülü ile Led Yakma Örnek Proje // 07.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// int led = 13; // led Dijital 13'e tanımlandı int button = 5; // Buton Dijital 5'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı pinMode(button, INPUT); // buton giriş olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { if(digitalRead(button) == HIGH) // buton durumu HIGH oldu ise yani basıldı ise { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } } ..
Sepete Ekle

5MM KIRMIZI LED MODÜLÜLed modülü üzerinde 5mm çapında kırmızı led bulundurur. 3 pinli yapısı sayesinde Arduino harici mikrokontrolcü uygulamalarında da kullanılabilir.Örnek Proje Devre ŞemasıBu projede kırmızı led modülünün yanıp sönmesi kodlanmıştır. Kartın 5 numaralı dijital pinine bağlı olan led modülü 5 saniye aralıklarla yanıp sönecektir.Kırmızı LED ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Kırmızı Led Modülü Kullanımı // 07.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 5; // led Dijital 5'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(led, HIGH); // led yansın delay(5000); // 5000ms yanma süresi digitalWrite(led, LOW); // led sönsün delay(5000); // 5000ms sönme süresi } ..
Sepete Ekle

5MM BEYAZ LED MODÜLÜBeyaz led modülü üzerinde 5mm beyaz led bulunan lamba şeklindeki modüldür. LED'ler elektrik enerjisini ışık enerjisine dönüştürür. Dijital çıkışlıdır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıkça kullanılan modüllerdendir. Projelerinizde ikaz, uyarı ve lamba vb. görevlerde kullanabilirsiniz.LED5mm Beyaz DIPEn33.82mmBoy44.04mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede beyaz led modülünün yanıp sönmesi kodlanmıştır. Kartın 5 numaralı dijital pinine bağlı olan led modülü 5 saniye aralıklarla yanıp sönecektir.Bu projede beyaz led modülü;Beyaz LED ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Beyaz Led Modülü Kullanımı // 07.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 5; // led Dijital 5'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(led, HIGH); // led yansın delay(5000); // 5000ms yanma süresi digitalWrite(led, LOW); // led sönsün delay(5000); // 5000ms sönme süresi }..
Sepete Ekle Modülü")
 Modülü")
MANYETİK SWITCH ( REED ROLE ) MODÜLÜ Manyetik switch modülü, etrafındaki manyetik alanı algılayıp, algıladığı manyetik alanın şiddetine göre çıkış verebilen bir sensör modülüdür. Nerede Kullanılır?Manyetik parçaların kullanıldığı robotik vb. projelerde kullanılır.Data ÇıkışıDijitalEn36.44mmBoy47.21mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede manyetik switch modülünün algıladığı değere göre kartın üzerindeki D13 pinine bağlı led yanacaktır. Sensör bir manyetik alan algılıyorsa led yanacak, algılamıyorsa led yanmayacaktır. Projede Reed röle modülü ile Arduino Uno Breadboard kullanılmıştır. Bu projede manyetik switch modülü;Manyetik Switch ModülüArduino Uno BreadboardDATAD3-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // Reed Röle Modülü Kullanımı // 08.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ int led = 13; // led Dijital 13'e tanımlandı int data = 3; // data değişkeni Dijital 3'e tanımlandı int digitalVal; // digitalVal değişkeni tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı pinMode(data, INPUT); // data giriş olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalVal = digitalRead(data); // Dijital 3 pinin durumu okundu if(digitalVal == HIGH) // Eğer manyetik alan algılandıysa { digitalWrite(led, HIGH); // Led yansın } else // Manyetik alan yok ise { digitalWrite(led, LOW); // Led sönsün } } ..
Sepete Ekle

LDR IŞIK SENSÖR MODÜLÜLDR (Light Dependent Resistor), ışığa duyarlı direnç olarak adlandırılmaktadır. LDR ışık sensörü modülü, sensörün üzerine düşen ışığın şiddetini ölçer. Sensörün ölçtüğü ışık şiddetine göre verdiği analog çıkış değeri değişmektedir. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıkça kullanılmaktadır. Aydınlatma sistmemleri, akıllı lamba, akıllı perde, akıllı ev, akıllı tarım, robotik vb. projelerde kullanılabilir. Ortamdaki ışık şiddetini ölçümleyebilirsiniz.Data Çıkışı AnalogÇalışma Voltajı5V DC En40.6mmBoy56.22mmVida Delik Çapı3.2mm Örnek Proje Devre ŞemasıBu projede LDR ışık sensöründen okunan değer seri porta yazdırılmıştır ve okunan değere göre kartın dijital 13 pinine bağlı olan LED yakılmıştır. Sensörden okunan değer 500'ün üzerindeyse LED yanacak, 500'ün altındaysa LED sönecektir. Projede LDR ışık sensör modülü ile Arduino Uno Breadboard kullanılmıştır.LDR Işık Sensör ModülüArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // LDR Işık Sensörü Kullanımı // 09.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 13; // led Dijital 13'e tanımlandı int ldr = A0; // ldr Analog 0'a tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı pinMode(ldr, INPUT); // ldr giriş olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { ldr = analogRead(A0); // Sensörün Data pini A0'dan okundu if(ldr > 500 ) // Okunan değer 500'den büyük ise { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } Serial.println(ldr); // ölçülen değer seri monitöre yazdırıldı delay(100); // 100ms gecikme süresi } ..
Sepete Ekle

DHT11 SICAKLIK VE NEM SENSÖRÜDHT11 sıcaklık ve nem sensörü modülü bulunduğu ortamın sıcaklık ve nemini ölçmekte ve ölçtüğü değer ile dijital sinyal çıkışı vermektedir. 0 ile 50°C arasında 2°C hata payı ile ölçüm yapabilmektedir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinizde ortamın sıcaklık ve nem değerlerini ölçmek için kullanabilirsiniz. Sıcaklık alarmı, dijital nem göstergesi vb. projelerde kullanılmaktadır.Çalışma Voltajı 5V DCSıcaklık Ölçüm Aralığı0⁰C - 50⁰CNem Ölçüm Aralığı20% - 90%Data ÇıkışDijitalEn47.75mmBoy64.53mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede DHT11 sıcaklık ve nem sensörü modülü ile ortamın sıcaklık ve nem değerleri ölçülecektir. Sensörün okuduğu sıcaklık değeri 29'dan büyükse kart üzerinde dijital 13 pinine bağlı olan LED yanacak, 29'dan küçükse LED yanmayacaktır. Projede DHT11 sıcaklık ve sensör modülü ile Arduino Uno Breadboard kullanılmıştır.DHT11 Sıcaklık ve Nem Sensör ModülüArduino Uno BreadboardDATAD2-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Sıcaklık ve Nem Sensörü DHT11 Kullanımı // 09.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // #include <dht11.h> // dht11 kütüphanesini tanımlandı int led = 13; // led Dijital 13'e tanımlandı int DHT11_pin=2; // DHT11_pin Dijital 2'ye tanımlandı dht11 DHT11_sensor; // DHT11_sensor adında bir DHT11 nesnesi oluşturuldu void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 Baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { int chk = DHT11_sensor.read(DHT11_pin); // Sensörden tüm veriler alındı ve değişkene atandı // Sensörden gelen veriler serial monitöre yazdırıldı Serial.print("Nem Orani (%): "); Serial.println((float)DHT11_sensor.humidity, 2); Serial.print("Sicaklik (Celcius): "); Serial.println((float)DHT11_sensor.temperature, 2); if(DHT11_sensor.temperature > 29) // eğer sıcaklık 29'dan büyükse { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } Serial.print("Sicaklik (Kelvin): "); Serial.println(DHT11_sensor.kelvin(), 2); Serial.print("Sicaklik (Fahrenheit): "); Serial.println(DHT11_sensor.fahrenheit(), 2); // Çiğ Oluşma Noktası Serial.print("Cig Olusma Noktasi: "); Serial.println(DHT11_sensor.dewPoint(), 2); Serial.println("------------------"); delay(1000); // 1000ms gecikme süresi }..
Sepete Ekle

MİKROFON / SES SENSÖRÜMikrofon / Ses sensörü modülü üzerinde hassas mikrofon bulunan ve sesin şiddetine göre dijital veya analog çıkış verebilen sensör modülüdür.Nerede Kullanılır?Arduino ile robotik kodlam projelerinizde kolaylıkla kullanabilirsiniz. Modül üzerindeki mikrofon modülü sayesinde ortamdaki ses şiddetini ölçünleyebilirsiniz.Çalışma Voltajı5V DCData Çıkışı Analog - DijitalEn39.2mmBoy56.1mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede sensörden okunan değere göre kartın üzerindeki dijital 13 pinine bağlı olan LED yanacaktır. Sensörden okunan değer belirlenen eşik değerinden yüksekse LED yanacak, düşükse LED sönecektir. Bu projede ses sensör modülü ile Arduino Uno Breadboard kullanılmıştır.Mikrofon / Ses Sensörü ModülüArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // Mikrofon / Ses Sensörü Kullanımı // 13.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ const int SensorOutPin = 0; //Veri okuyacağımız pin A0'a tanımlandı const int ledPin = 13; //led Dijital 13'e tanımlandı int deger; //Mikrofondan okunan değerin tutulacağı değişken tanımlandı const int esik = 820; //Ledin yanmasını istediğimiz eşik değeri tanımlandı // Eşik değerinin hassasiyeti kart üzerindeki potansiyometre ile değiştirilebilir. void setup() // Başlangıç Ayarlamaları { pinMode(ledPin, OUTPUT); //led çıkış olarak ayarlandı Serial.begin(9600); //Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { deger = analogRead(SensorOutPin); //Sensörden okunan değer "deger" değişkenine atandı if (deger > esik) // eğer okunan değer eşik değerimizden büyükse { digitalWrite(ledPin, HIGH); // Led yansın } else // değilse { digitalWrite(ledPin, LOW); // Led sönsün } Serial.println(deger); delay(200); } ..
Sepete Ekle

MQ-2 GAZ SENSÖRÜ MQ2 gaz sensörü modülü 300 – 10.000ppm aralığında gaz ve sigara dumanı algılayan sensör modülüdür. MQ-2 gaz sensörü, uçan ve yanıcı gaz çeşitlerini (lpg, alkol, propan, hidrojen, metan, karbonmonoksit ve duman da dahil) konsantrasyonlarını algılamak için kullanılır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde, duman dedektörü, akıllı ev vb. projelerde kullanılabilir.Çalışma Voltajı5V DCÖlçüm Hassasiyeti300 - 10.000ppmData ÇıkışıAnalog - DijitalEn43.45mmBoy57.5mmVida Delik Çapı3.2mmÖrnek Proje UygulamasıBu projede MQ2 gaz sensörü kullanılarak ortamdaki yanıcı gaz miktarı ölçülmüştür ve ölçülen gaz belirlediğimiz bir eşik değeri üzerine çıktığında kartımızın D13 pininde bulunan mavi LEDin yanması kodlanmıştır.*Bu örnek projede yanıcı gaz olarak çakmak gazı kullanılabilir. Yetişkinlerin kontrolünde yapmayı unutmayın.MQ-2 Gaz SensörüArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // MQ2 Gaz Sensör Modülü Kullanımı // 15.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ #define MQ2pin (0) float sensorValue; //variable to store sensor value void setup() { Serial.begin(9600); // sets the serial port to 9600 Serial.println("Gas sensor warming up!"); delay(20000); // allow the MQ-6 to warm up } void loop() { sensorValue = analogRead(MQ2pin); // read analog input pin 0 Serial.print("Sensor Value: "); Serial.print(sensorValue); if(sensorValue > 300) { Serial.print(" | Smoke detected!"); } Serial.println(""); delay(2000); // wait 2s for next reading } ..
Sepete Ekle

TOPRAK NEM SENSÖRÜToprak nem sensörü modülü topraktaki nem değerini ölçen sensör modülüdür. Sensör topraktan aldığı nem değerine göre analog çıkış vermektedir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıkça kullanılmaktadır. Akıllı tarım, akıllı sulama vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı AnalogEn21.81mmBoy82.14mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede toprak nem sensörü modülünün topraktan okuduğu değere göre kart üzerindeki dijital 13 numaralı pine bağlı LED yanacaktır. Sensörün okuduğu değer 600'den büyükse LED yanacak, 600'den küçükse LED sönecektir. Projede toprak nem sensörü ile Arduino Uno Breadboard kullanılmıştır.Toprak Nem SensörüArduino Uno BreadboardDATAA3-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Toprak Nem Sensörü Kullanımı // 14.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // const int data = A3; //Veri okuyacağımız pin A3'e tanımlandı int led = 13; //led Dijital 13'e tanımlandı int deger; //Sensörden okunan değerin tutulacağı değişken tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); //led çıkış olarak ayarlandı Serial.begin(9600); //Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { deger = analogRead(data); //Sensörden okunan değer "deger" değişkenine atandı if(deger > 600) //Okunan değer 600'den büyükse { digitalWrite(led, HIGH); //led yansın } else //değilse { digitalWrite(led, LOW); //led sönsün } Serial.print("Toprak Kuruluğu "); //seri ekrana "Toprak Kuruluğu" yazdırıldı Serial.println(deger); //yazıdan sonra okunan değer yazdırıldı delay(500); //500ms gecikme süresi }..
Sepete Ekle

JOYSTICK MODÜLÜJoystick modülü X ve Y olmak üzere 2 eksene sahiptir. Ayrıca ortasında da bir adet buton bulunur. Joystick ileri-geri, sağ-sol yönlendirmeleriyle kullanılmaktadır. X ve Y ekseninden okuduğu değerleri analog çıkış olarak verirken, butondan okuduğu değerleri dijital çıkış olarak verir.Nerede Kullanılır?Arduino robotik kodlama projelerinde sıkça kullanılmaktadır. Özellikle yaptığınız bir robotu kontrol etmek için, servo veya dc motor kontrollerinde, robot kol uygulamalarında joystick modülünü kullanabilirsiniz.Çalışma Voltajı5V DC Data Çıkışı2 Analog ( X - Y ) , 1 Dijital (Buton)En57.73mmBoy46.73mmVida Delik Çapı3.1-2mmÖrnek Proje Devre ŞemasıBu projede joystick modülünün X, Y değerleri ve buton durumları okunarak seri porta yazdırılacaktır. Projede joystick modülü ile Arduino Uno Breadboard kullanılmıştır.Joystick ModülüArduino Uno Breadboard-GND+5VSWD2VRxA0VRyA1Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Joystick Modülü Kullanımı // 14.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// int xPin = A0; // A0-A5 analog pinlerinden herhangi birine bağlanabilir. int yPin = A1; // A0-A5 analog pinlerinden herhangi birine bağlanabilir. int butonPin = 2; // Joystick buton pini arduino bağlantısı (Joystick SW çıkışı) int xPozisyonu = 0; // xPozisyonu başlangıç değeri 0 tanımlandı int yPozisyonu = 0; // yPozisyonu başlangıç değeri 0 tanımlandı int butonDurum = 0; // butonDurum başlangıç değeri 0 tanımlandı void setup() // Başlangıç Ayarlamaları { Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı pinMode(xPin, INPUT); // xPin giriş olarak ayarlandı pinMode(yPin, INPUT); // yPin giriş olarak ayarlandı pinMode(butonPin, INPUT); // butonPin giriş olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { xPozisyonu = analogRead(xPin); // Modülün A0'dan alınan değer = xPozisyonu yPozisyonu = analogRead(yPin); // Modülün A1'dan alınan değer = yPozisyonu butonDurum = digitalRead(butonPin); // Modülün D2'den alınan değer = butonDurum Serial.print("X Pozisyonu: "); // Seri monitöre "X Pozisyonu:" yazdırıldı Serial.print(xPozisyonu); // Seri monitöre joystiğin x değeri yazdırıldı Serial.print(" | Y Pozisyonu: "); // Seri monitöre " | Y Pozisyonu:" yazdırıldı Serial.print(yPozisyonu); // Seri monitöre joystiğin y değeri yazdırıldı Serial.print(" | Buton Durum: "); // Seri monitöre " | Buton Durum:" yazdırıldı Serial.println(butonDurum); // Seri monitöre joystiğin butonDurum değeri yazdırıldı delay(100); // 100ms gecikme } ..
Sepete Ekle

10K POTANSİYOMETRE MODÜLÜ Potansiyometre, kontrol edilebilen ayarlı bir dirençtir. El ile kontrol edilebilen potansiyometreden 0 ile 1023 arası analog çıkış elde edilmektedir. Nerede Kullanılır? Arduino ile robotik kodlama projelerinde sıkça kullanılmaktadır. Örneğin kullanılan ledin ışık şiddeti, buzzerın ses şiddeti, servo motorun açısı, motorun hızı veya yönü potansiyometre ile ayarlanıp değiştirilebilir. Çalışma Voltajı 5V DC Data Çıkışı Analog (0-1023V) Pot Değeri 10K En 39,73mm Boy 46.73mm Vida Delik Çapı 3.2mm Örnek Proje Devre Şeması Bu projede potansiyometreden okunan değere göre Arduino Uno Breadboard'un D13 pininde bulunan mavi LEDin yanması kodlanmıştır. Potansiyometreden okunan analog değer 800'den (bu değer değiştirilebilir) büyük olduğu zaman LED yanacak, küçük olduğunda ise LED sönecektir. Örnek Proje Arduino Kodu /* ALPGEN Robotics *///* Potansiyometre Modülü Kullanımı// 15.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com// www.alpgenrobotics.com *//int potpin = A0; // Potansiyometreyi A0 pinine tanımlıyoruzint deger = 0; // Pot başlangıç değeri 0 tanımlandıint led = 13; // led Dijital 13'e tanımlandı void setup() // Başlangıç Ayarlamaları{ pinMode(led, OUTPUT); // led çıkış olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı}void loop() // Sürekli Tekrar Edecek Olan Döngü{ deger = analogRead(potpin); // Modülden okunan değer "deger" değişkenine atandı if (deger > 800) //Eğer okunan değer 800'den büyükse { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } Serial.println(deger); // Okunan değer seri monitörde mesaj olarak gönderilir delay(100); // 100ms gecikme} ..
Sepete Ekle

BUZZER MODÜLÜBuzzer modülü, ses çıkarabilen, genellikle alarm projelerinde kullanılan, dijital çıkışlı bir modüldür. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde ses çıkışı alınması gereken, alarm vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı Dijital En47.54mmBoy55.22mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede buzzerdan ses çıkışı alınmaktadır. Buzzer 1 saniye aralıklarla ses çıkışı verecektir. Projede buzzer modülü ile Arduino Uno Breadboard kullanılmıştır.Buzzer ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Buzzer Modülü Kullanımı // 17.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int buzzer = 5; // buzzer Dijital 5'e tanımlandı int led = 13; // led Dijital 13'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(buzzer, OUTPUT); // buzzer çıkış olarak ayarlandı pinMode(led, OUTPUT); // led çıkış olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { digitalWrite(buzzer, HIGH); // buzzer çalsın digitalWrite(led, HIGH); // led yansın delay(1000); // 1sn gecikme digitalWrite(buzzer, LOW); // buzzer dursun digitalWrite(led, LOW); // led sönsün delay(1000); // 1sn gecikme }..
Sepete Ekle

KIZILÖTESİ MOTOR HIZ SENSÖRÜMotor hız sensörü modülü kızılötesi alıcı ve vericiden oluşmaktadır. Alıcı ve verici arasında gönderilen dalgalar kesintiye uğradığında sensör analog çıkış vermektedir. Motorların hız ölçümlerinde kullanılabilir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde motor hız ölçüm projelerinde kullanılabilir. Onun haricinde devrede bir anahtar gibi kullanılabilir. Sensör arasına engel konulduğunda kesim gerçekleşeceğinden çıkış ölçümleyebilirsiniz. Bu özelliğiyle bazı güvenlik projelerinde akıllı ev sistemlerinde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı AnalogEn36.91mmBoy40.5mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede kesme sensörü modülü kullanılarak alıcı ile verici arasında kesinti olduğunda kart üzerindeki dijital 13 pinine bağlı LED yanacak ve okunan değer 1'er saniye arayla seri porta yazdırılacaktır. Bu projede kesme modülü ile Arduino Uno Breadboard kullanılmıştır.Kızılötesi Motor SensörüArduino Uno BreadboardDATAA2-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Photo Interrupter Kullanımı // 17.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// int led = 13; // led dijital 13'e tanımlandı int sensor = A2; // Sensörün data pini Analog 2'ye tanımlandı int val = 0; // Sensörden okunacak veriler için değişken tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led,OUTPUT); // led çıkış olarak ayarlandı pinMode(sensor, INPUT); // sensor giriş olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { val = analogRead(sensor); // Sensörden okunan değer "val" değişkenine atandı Serial.println(val); // Seri monitöre okunan değer yazdırıldı delay(1000); // 1000ms gecikme süresi }..
Sepete Ekle

DARBE ( COLLISION ) MODÜLÜDarbe sensörü modülü üzerinde bulunan anahtar (switch) ile darbeyi algılamaktadır. Sensör darbeye temas ettiğinde anahtar kapanmakta ve modül üzerindeki kırmızı led yanmaktadır. Dijital çıkışlıdır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde robotlarda, engel algılayıcı sistemlerde veya güvenlik sistemlerinde darbe sensörü kullanılabilir.Data Dijital Çalışma Voltajı5V DC En36.02mm Boy56.43mm Vida Delik Çapı3.2mm Örnek Proje Devre ŞemasıBu projede darbe sensörü darbe algıladığı zaman kartın üzerindeki dijital 13 numaralı pine bağlı LED yanacaktır. Bu projede darbe sensörümüzün data pini kartımızın D5 pininden okunur. Eğer sensör darbeye çarptıysa iletime geçecektir ve data pininden kartımıza 5V gidecektir. Kartımızın D5 pininden 5V algılandığında kartın D13 pininde bulunan mavi LED yanacaktır. Ayrıca sensör darbe ile temas ettiğinde sensör üzerinde bulunan kırmızı LED de yanmaktadır.Darbe ( COLLISION ) ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Darbe (Collision) Sensörü Kullanımı // 19.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 13; // led Dijital 13'e tanımlandı int darbe = 5; // sensörün data çıkışı dijital 5'e tanımlandı int val; // val isminde durum değişkeni tanımlandı void setup () // Başlangıç Ayarlamaları { pinMode (led, OUTPUT); // led çıkış olarak ayarlandı pinMode (darbe, INPUT); // sensörün alınacak veri giriş olarak ayarlandı } void loop () // Sürekli Tekrar Edecek Olan Döngü { val = digitalRead (darbe); // D5'pini dijital okundu ve val değişkenine atandı if(val == HIGH) // Eğer val değişkeni HIGH (5V) olursa { digitalWrite (led, LOW); // led yansın } else // değilse { digitalWrite (led, HIGH); // led sönsün } }..
Sepete Ekle

IR ALICI MODÜLÜIR alıcı modülü kızılötesi sinyallerle kablosuz haberleşmeyi sağlayan modüldür. Arduino projelerinde sıkça kullanılmaktadır. Uzaktan haberleşme yapabileceğiniz basit kullanımlı işlevsel bir modüldür.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde robotik, uzaktan kumanda ile kontrol edilen araç vb. projelerde kullanılabilir.Çalışma Voltajı5V DCGörme Açısı60ºÇalışma Frekansı38KHzMenzil8 MetreEn32.28mmBoy49.81mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede IR alıcı kumandasından basılan tuşlar seri porta yazdırılacak ve basılan tuşlara göre trafik ışığı modülündeki LEDler yanacaktır. Bu projede IR alıcı modülü, Trafik ışığı modülü ve Arduino Uno Breadboard kullanılmıştır.IR Alıcı ModülüArduino Uno BreadboardDATAD2-GND+5V Trafik Işığı Modülü-GNDRD3YD4GD5Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // IR Alıcı Verici Kullanımı // 19.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // #include <IRremote.h> // IR kumanda kütüphanesi eklendi int RECV_PIN = 2; // IR Alıcının data pini dijital 2'ye tanımlandı IRrecv irrecv(RECV_PIN); // Gelen verileri almak için değişken tanımlandı decode_results results; // gelen veriler decode edilerek results adlı değişkene atandı #define CH1 0xFFA25D ///////////////////////////////////////////////////////////// #define CH 0xFF629D // #define CH2 0xFFE21D // #define PREV 0xFF22DD // #define NEXT 0xFF02FD // #define PLAYPAUSE 0xFFC23D // #define VOL1 0xFFE01F // #define VOL2 0xFFA857 // #define EQ 0xFF906F // #define BUTON0 0xFF6897 // Kumanda üzerindeki tüm butonları adresleri tanımlandı #define BUTON100 0xFF9867 // #define BUTON200 0xFFB04F // #define BUTON1 0xFF30CF // #define BUTON2 0xFF18E7 // #define BUTON3 0xFF7A85 // #define BUTON4 0xFF10EF // #define BUTON5 0xFF38C7 // #define BUTON6 0xFF5AA5 // #define BUTON7 0xFF42BD // #define BUTON8 0xFF4AB5 // #define BUTON9 0xFF52AD ///////////////////////////////////////////////////////////// int red = 3; // Trafik Işığı Yeşil Led D5'e tanımlandı int yellow = 4; // Trafik Işığı Turuncu Led D4'e tanımlandı int green = 5; // Trafik Işığı Kırmızı Led D3'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(red, OUTPUT); // red çıkış olarak ayarlandı pinMode(yellow, OUTPUT); // yellow çıkış olarak ayarlandı pinMode(green, OUTPUT); // green çıkış olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı irrecv.enableIRIn(); // IR alıcı aktif edildi } void loop() // Sürekli Tekrar Edecek Olan Döngü { if (irrecv.decode( & results)) // Eğer alıcı anlamlı veri aldıysa { if (results.value == BUTON1) // Gelen veri BUTON1 ise { Serial.println("1"); // Seri ekrana "1" yazdırıldı digitalWrite(red, HIGH); // ve led1 yansın } if (results.value == BUTON2) // Gelen veri BUTON2 ise { Serial.println("2"); // Seri ekrana "2" yazdırıldı digitalWrite(yellow, HIGH); // ve led2 yansın } if (results.value == BUTON3) // Gelen veri BUTON3 ise { Serial.println("3"); // Seri ekrana "3" yazdırıldı digitalWrite(green, HIGH); // ve led3 yansın } if (results.value == BUTON4) // aynı şekilde tüm butonlar ekrana yazdırılır { Serial.println("4"); } if (results.value == BUTON5) { Serial.println("5"); } if (results.value == BUTON6) { Serial.println("6"); } if (results.value == BUTON7) { Serial.println("7"); } if (results.value == BUTON8) { Serial.println("8"); }..
Sepete Ekle

RGB LED MODÜLÜRGB LED modülü ana renkleri (kırmızı, yeşil, mavi) karıştırarak renk skalasının her tonunda renk elde edilmesini sağlar. Modül üzerinde 3 renkli 5mm RGB LED bulunmaktadır. Ayrıca her rengin renk kodu bulunmaktadır, istenilen rengin renk kodunu kullanarak da LEDin istenilen renkte yanması sağlanabilir. RGB LED modülü, PWM pinleri ile kullanılır. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde led uygulamalarında kullanılabilir. Örneğin gece lambası yapılabilir. Uzaktan kontrol modülleri (IR kumanda veya Bluetooth vb.) ile renk geçişlerini uzaktan yapabilirsiniz. Kullanmak için data pinlerini PWB pinlerine takmanız gerekmektedir. LEDÇok Renkli DIPEn33.82mmBoy44.04mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede RGB LED modülü 0-255 değeri arasında, 2'şer saniye arasında atanan rastgele değerlere göre farklı renklerde yanacaktır.RGB LED ModülüArduino Uno Breadboard+5VRD3GD5BD6Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // RGB Led Modül Kullanımı // 04.07.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int R=3; int G=5; int B=6; void setup() { pinMode(R,OUTPUT); pinMode(G,OUTPUT); pinMode(B,OUTPUT); } void loop() { //Kırmızı renk elde etmek için... analogWrite(R,0); analogWrite(G,255); analogWrite(B,255); delay(500); //Yeşil renk elde etmek için... analogWrite(R,255); analogWrite(G,0); analogWrite(B,255); delay(500); //Mavi renk elde etmek için... analogWrite(R,255); analogWrite(G,255); analogWrite(B,0); delay(500); } ..
Sepete Ekle

TİTREŞİM SENSÖR MODÜLÜTitreşim sensör modülü, titreşimin olup olmadığını ve şiddetini ölçebilen, titreşim algıladığında analog ve dijital çıkış veren sensör modülüdür. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde alarm, güvenlik sistemi, robotik vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı Analog - DijitalEn32.95mmBoy43.59mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede titreşim sensörü titreşim algıladığında kart üzerindeki dijital 13 pinine bağlı LED yanacaktır. Projede titreşim sensörü ile Arduino Uno Breadboard kullanılmıştır.Titreşim Sensör ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Titresim Modülü ile Led Yakma Örnek Proje // 04.07.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int led = 13; // led Dijital 13'e tanımlandı int titresim = 5; // Titresim Dijital 5'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı pinMode(titresim, INPUT); // titresim giriş olarak ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { if(digitalRead(titresim) == HIGH) // titresim durumu HIGH oldu ise yani titreşim algılandıysa { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } }..
Sepete Ekle

TEMT6000 IŞIK SENSÖRÜTEMT6000 ışık sensör modülü, ışığa aşırı duyarlı direnç olarak adlandırılan bir sensördür. Sensörün üzerine düşen ışığın şiddetine göre verdiği çıkış değeri değişmektedir. Analog çıkışlıdır. Çok hassas ışık şiddeti ölçümleri gerektiren projelerde kullanılabilir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde hassas ışık şiddeti ölçümlerinde kullanılabileceği gibi akıllı lamba, akıllı ev veya ışık izleyen robot vb. projelerde de kullanılabilir.Çalışma Voltajı5V DCData Çıkışı AnalogEn32.61mmBoy51.3mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede temt6000 ışık sensörü modülü, okuduğu ışık değerini seri porta yazdıracaktır. Projede temt6000 hassas ışık sensörü ile Arduino Uno Breadboard kullanılmıştır.Hassas Işık SensörüArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu /* ALPGEN Robotics */ // Hassas Işık Sensörü Modülü Kullanımı // 22.06.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int temt6000Pin = 0; //TEMT6000 analog 0 pinine bağlı void setup() // Başlangıç Ayarlamaları { Serial.begin(9600); // Seri haberleşmeye hızı 9600 Baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { int value = analogRead(temt6000Pin); // Verilerinin kaydedileceği değişken tanımlandı ve durumu okundu Serial.println(value); // Seri monitöre veriler yazdırıldı delay(200); // 200ms gecikme süresi } ..
Sepete Ekle

IR ATEŞ SENSÖR MODÜLÜIR ateş sensörü modülü dalga boyu 760nm ile 1100nm aralığındaki yangın kaynağını ya da diğer ışık kaynaklarını algılamak için kullanılır. Modül üzerinde bir adet IR alıcı ve bir adet trimpot bulunur. Trimpot ile hassasiyet ayarı yapılabilir. IR alıcı modülü, hem dijital hem analog çıkış verebilir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıkça kullanılmaktadır. Yangın alarmı, yangın söndürme robotu vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData ÇıkışıAnalog - DijitalEn35.37mmBoy55.8mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede IR ateş modülünden okunan değer seri porta yazdırılacak ve okunan değere göre kart üzerindeki dijital 13 pinine bağlı LED yanacaktır. Sensörden okunan değer 980'den büyükse LED yanacak, küçükse LED sönecektir. Projede IR Ateş sensörü modülü ile Arduino Uno Breadboard kullanılmıştır.IR Ateş Sensör ModülüArduino Uno Breadboard-GND+5VD0D2A0A0Örnek Proje Arduino Kodu/* ALPGEN Robotics // IR Ateş Modülü Kullanımı // 05.08.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ #define Analog A0 //Alev modülünün analog çıkış A0'a bağlı #define Digital 2 //Alev Modülünün dijital çıkışı D2'ye bağlı #define LED 13 // Durum ledi dijital 13'e tanımlandı int AnalogValue = 0; //Analog verilerin tutulacağı değerin tanımlanması void setup() { //Giriş ve Çıkış pinlerinin tanımlanması pinMode(LED, OUTPUT); pinMode(Digital, INPUT); pinMode(Analog, INPUT); digitalWrite(LED, LOW); //Ledi söndürme Serial.begin(9600); // Seri haberleşme hızı 9600 Baudrate ayarlandı } void loop() { AnalogValue = analogRead(Analog); //Analog verinin okunup kaydedilmesi Serial.println(AnalogValue); //Seri monitöre analog verinin yazdırılması if(AnalogValue > 980) // eğer analog veri 960'dan büyükse { digitalWrite(LED,HIGH); // durum ledi yansın } else //değilse { digitalWrite(LED,LOW); // durum ledi sönsün } delay(300); // 300ms gecikme süresi } ..
Sepete Ekle

SU SEVİYE SENSÖR MODÜLÜSu Seviye Sensör Modülü suyun seviyesini ölçer. Ölçtüğü değere göre analog çıkış vermektedir. Nerede Kullanılır?Arduino ile robotik kodlama projelerinizde kolayca kullanabilirsiniz. Sensörün ölçümleyebileceği su seviyesi sensörün boyu kadardır. Akıllı sulama, akıllı saksı, akıllı tarım, akıllı ev vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı AnalogEn30.92mmBoy70.75mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede su seviyesi sensörü modülünden ölçülen değer 2 saniye arayla seri porta yazdırılacaktır. Projede su seviye sensör modülü ile Arduino Uno Breadboard kullanılmıştır.Su Seviye Sensör ModülüArduino Uno BreadboardDATAA3-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Su Seviye Sensörü Kullanımı // 05.07.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // const int prob = A3; // Su sensörü Analog 0'a tanımlandı int olcum_sonucu; //Ölçüm sonucu'un kaydedileceği değişkenin tanımlanması void setup() // Başlangıç Ayarlamaları { Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { olcum_sonucu = analogRead(prob); // Sensörün Data pini okundu Serial.print("Su Sensörü "); // Seri monitöre "Su Sensörü" yazdırıldı Serial.println(olcum_sonucu); // ölçülen değer seri monitöre yazdırıldı delay(500); // 500ms gecikme süresi }..
Sepete Ekle

ENCODER MODÜLÜEncoder sensör modülü, giriş birimi olarak kullanılan bir modüldür. Encoder yönü değiştiğinde farklı dijital çıkış vermektedir. Arduino uyumlu Rotary Encoder / Döner Enkoder Modülü çeşitli projelerde kolayca kullanabileceğiniz bir giriş birimidir. 5V ile çalışan bu encoder çıkışları dijital olup saat yönünde farklı saat yönünün tersinde farklı çıkış vermektedir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde rotary enkoder modülü ile ekranlar için menüler yapabilirsiniz. Sonsuz turdaki dönüş özelliği sayesinde özellikle LCD ekran projelerinde sıkça kullanılmaktadır.Çalışma Voltajı5V DCData ÇıkışıDijitalEn40.58mmBoy52.3mmVida Delik Çapı3.2mm Örnek Proje Devre ŞemasıBu projede encoder sensör modülü, okuduğu değeri seri porta yazdıracaktır. Encoder çevrildiğinde okuduğu değer değişecektir. Projede rotary enkoder modülü ile Arduino Uno Breadboard kullanılmıştır.Encoder ModülüArduino Uno Breadboard-5V+GNDD1D3D2D2Örnek Proje Arduino Kodu/* ALPGEN Robotics // Encoder Modülü Kullanımı // 15.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ volatile unsigned int temp, counter = 0; //Bu değişkenleri encoder hareket ederken ve daha önceki konumu ile karşılaştırmak için kullanacağız void setup() { Serial.begin (9600); pinMode(2, INPUT_PULLUP); // Arduinonun 2. pininin giriş ve dahili PULLUP dirençli olduğunun tanımlanması pinMode(3, INPUT_PULLUP); // Arduinonun 3. pininin giriş ve dahili PULLUP dirençli olduğunun tanımlanması /* Aşağıda "interrupt" dediğimiz bölme,araya girme anlamları olan fonksiyonları tanımlıyoruz burada temel mantık şu; * Bu pinlerdeki sinyalde değişiklik olduğu anda işlemci yaptığı işi yarım bırakıp bu pine bağlı fonksiyonu yapıp normal işlemlerine geri dönecek. * Bu işlemi yaptırtabilemek için bu pinlere interrupt koyduğumuzu belirten kodu yazıyoruz. */ //Burada 2 numaralı pinde sinyal seviyesi yükselidinde "Interrupt_fonksiyonu1" i çalıştır diyoruz attachInterrupt(digitalPinToInterrupt(2), Interrupt_fonksiyonu1, RISING); //Burada 3 numaralı pinde sinyal seviyesi yükselidinde "Interrupt_fonksiyonu2" i çalıştır diyoruz attachInterrupt(digitalPinToInterrupt(3), Interrupt_fonksiyonu2, RISING); } //Yukarıdaki kodda "Interrupt_fonksiyonu1" ve "Interrupt_fonksiyonu2" içerisinde ne olacağını en aşağıda belirledik void loop() { // Aşağıdaki if kodunda elimizdeki "counter" değeri ile kayıtlı olan "temp" değeri aynı mı onu kontrol ediyoruz aynı ise işlem yapmıyoruz fakat farklı // ise "counter" değerimizi serial porta yazdırıyoruz ve yeni counter değerimizi "temp" değerine kayıt ediyoruz if( counter != temp ){ Serial.println (counter); temp = counter; } } void Interrupt_fonksiyonu1() { // bu fonksiyon 2 numaralı pinde sinyal değerimiz yükseldiğinde çalışıyor diğer pinin sinyaline bakıp saat yönünde yada tersine döndüğünü tayin ediyoruz // dönüş yönüne göre değeri arttırıp azaltıyoruz if(digitalRead(3)==LOW) { counter++; }else{ counter--; } } void Interrupt_fonksiyonu2() { // bu fonksiyonda aynı üsteki fonksiyon gibi 3 numaralı pinde sinyal değerimiz yükseldiğinde çalışıyor diğer pinin sinyaline bakıp saat yönünde yada tersine döndüğünü tayin ediyoruz // dönüş yönüne göre değeri arttırıp azaltıyoruz if(digitalRead(2)==LOW) { counter--; }else{ counter++; } }..
Sepete Ekle Modülü")
 Modülü")
CIVALI SENSÖR ( MAGIC LIGHT CUP )Titreşime duyarlı sensör modülü, üzerinde titreşim sensörü ve led bulunduran modüldür. Sensör titreşim algıladığında dijital çıkış verir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde kullanabilirsiniz. Sensör titrediğinde üzerinde bulunan led yanmaktadır. Titreşime duyarlı alarm projelerinde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı DijitalEn33.16mmBoy54.46mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede titreşime duyarlı sensör modülü titreşim algıladığında modülün üzerindeki LED yanacaktır. Projede titreşime duyarlı led sensörü ve Arduino Uno Breadboard kullanılmıştır.Mercury Sensor (Magic Light Cup)Arduino Uno Breadboard-GND+5VLEDD8SED2Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Titreşime Duyarlı Sensör Modülü // 05.08.2021 // Soru ve yardım için: proje@alpgenrobotics.com // www.alpgenrobotics.com // #define Tilt 2 // Modülün SW pini D2 pinine bağlı #define led 8 // Modülün led pini D8 pinine bağlı void setup() { // Giriş ve çıkış pinlerinin tanımlanması pinMode(Tilt, INPUT); pinMode(led, OUTPUT); } void loop() { if(digitalRead(Tilt)) // Tilt sensöründen DO düşükse, tilt algılanmadı digitalWrite(led,HIGH); // led yansın else digitalWrite(led ,LOW); // led kapansın } ..
Sepete Ekle

ÇİZGİ TAKİP SENSÖR MODÜLÜÇizgi takip sensör modülü, zemindeki siyah renkli çizgiyi ya da siyah zemindeki beyaz renkli çizgiyi algılayabilen modüldür. 1-2 cm mesafeden çizgiyi algılayabilmektedir. Dijital çıkışlıdır. Sensör üzerinde 3 adet CNY70 bulunmaktadır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde çizgi izleyen robot vb. projelerde çizgi takip sensör modülü kullanılabilir. Çizgi izleyen robot yarışmalarında kullanılabilir. Çalışma Voltajı5V DCData ÇıkışıDijitalEn61.04mmBoy38.08mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede çizgi takip sensörü modülü, çizgi algıladığı sensöre göre seri porta değer yazacaktır. Çizgi takip sensör modülü s1, s2 ve s3 olarak tanımlanan üç sensörden hangisi çizgi algılarsa ekrana onun yazdıracaktır. Bu projede 3'lü Çizgi İzleyen SSensör modülü ile Arduino Uno Breadboard kullanılmıştır.CNY70 3'Lü Çizgi Takip Sensör ModülüArduino Uno Breadboard-5V+GNDS1D4S2D3S3S2Örnek Proje Arduino Kodu /* ALPGEN Robotics */ // Çizgi İzleyen Modülü Kullanımı // 05.08.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // // Sensör pinlerinin tanımlanması #define s1 2 #define s2 3 #define s3 4 // Sensörler için durum değişkeni tanımlanması int s1Durum; int s2Durum; int s3Durum; void setup() { // Pin girişlerinin tanımlanması pinMode(s1, INPUT); pinMode(s2, INPUT); pinMode(s3, INPUT); // Seri haberleşme hızının 9600 baud olarak ayarlanması Serial.begin(9600); } void loop() { // Sensör pinlerimizin okunup tanımlanan değişkenlere kaydedilmesi s1Durum = digitalRead(s1); s2Durum = digitalRead(s2); s3Durum = digitalRead(s3); if(s1Durum == HIGH) // Eğer s1 pini beyaz çizgi görmuş ise { Serial.println("S1"); // Seri ekrana S1 yazdır } if(s2Durum == HIGH) // Eğer s2 pini beyaz çizgi görmuş ise { Serial.println("S2"); // Seri ekrana S2 yazdır } if(s3Durum == HIGH) // Eğer s3 pini beyaz çizgi görmuş ise { Serial.println("S3"); // Seri ekrana S3 yazdır } }..
Sepete Ekle

L298N DC MOTOR SÜRÜCÜ MODÜLÜ L298N DC Motor Sürücü Modülü, DC motor kullanacağınız projelerde kullanarak motor kontrolü gerçekleştirebileceğiniz modüldür. Motor sürücü kartına bağlayacağınız 2 motoru ileri veya geri tam güçte ya da istediğiniz hızda sürebilirsiniz. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde özellikle robotlarda L298N DC motor sürücü kullanılabilir. Çizgi izleyen robot, engelden kaçan robot, bluetooth kontrollü robot gibi Arduino projelerinde L298N Dc motor sürücü modülü kullanabilirsiniz. Modülün VCC pini pil girişi olup +5V pininden aldığınız güç ile Arduino'nuzu çalıştırabilirsiniz.Data Çıkışı Dijital Çalışma Voltajı5V DC En52.05mmBoy69.37mmVida Delik Çapı3.2mm Örnek Proje Devre ŞemasıBu projede L298 DC Motor Sürücü Modülünün IN1 giriş D2 pinine, IN2 giriş D3 pinine, IN3 giriş D4 pinine, IN4 giriş D5 pinine bağlanması ve her saniye yön değiştiren 2 DC motor kodlanmıştır. ENA ve ENB pinleri ise Arduino'nun 5V pinine bağlanarak motorların tam hızda dönmesi sağlanmıştır. Hız ayarı yapabilmek için ENA ve ENB pinlerini PWM pinlerine takarak ona göre kodlama yapmamız gerekirdi.L298N DC Motor Sürücü ModülüArduino Uno BreadboardIN15IN24IN33NI42Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // L298N Motor Sürücü Modülü Kullanımı // 05.08.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // // 1. Motor için pinlerin tanımlanması int motor1pin1 = 2; int motor1pin2 = 3; // 2. Motor için pinlerin tanımlanması int motor2pin1 = 4; int motor2pin2 = 5; void setup() { // Tanımlanan pinlerin çıkış olarak ayarlanması pinMode(motor1pin1, OUTPUT); pinMode(motor1pin2, OUTPUT); pinMode(motor2pin1, OUTPUT); pinMode(motor2pin2, OUTPUT); } void loop() { // 1. ve 2. Motorların 1. pinlerine güç verilmesi digitalWrite(motor1pin1, HIGH); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, HIGH); digitalWrite(motor2pin2, LOW); //1000mslik bekleme yapılması delay(1000); // 1. ve 2. Motorların 2. pinlerine güç verilmesi digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, HIGH); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2, HIGH); //1000mslik bekleme yapılması delay(1000); }..
Sepete Ekle

DC MOTOR FAN MODÜLÜFan modülü, fanın hız ve yön kontrolü yapılabildiği modüldür. Arduino projelerinde kullanabilirsiniz. Örnek kullanım aşağıda bulunmaktadır.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde STEM eğitimlerinde kullanılabilir.Çalışma Voltajı5V DCData ÇıkışıDijitalEn42.09mmBoy49.67mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede fan modülü çalışırken yönünün değişmesi kodlanmıştır. Fan çalışmaya başladıktan sonra 1'er saniye arayla farklı yönlere dönecektir.DC Motor Fan ModülüArduino Uno Breadboard+5V-GNDIN1D2IN2D3Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Fan Modülü Kullanımı // 05.08.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // // Fan modülü için pinlerin tanımlanması int IN1 = 2; int IN2 = 3; void setup() { // Tanımlanan pinlerin çıkış olarak ayarlanması pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); } void loop() { // Modülün IN1 pinine güç verilmesi digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); //1000mslik bekleme yapılması delay(1000); // Modülün IN2 pinine güç verilmesi digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); //1000mslik bekleme yapılması delay(1000); }..
Sepete Ekle

ULN2003 STEP MOTOR SÜRÜCÜULN2003 Step Motor Sürücü Modülü, elektrik enerjisini dönme hareketine dönüştüren, dijital çıkışlı, step motor sürmek için kolaylıkla kullanılabilecek küçük bir sürücü modülüdür.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde kullanılabilir. Özellikle step motor kullanılan robotik uygulamalarda step motor sürücüsü olarak kullanabilirsiniz. Çalışma Voltajı5V DCData Çıkışı DijitalEn43.77mmBoy45.06mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede, modülün IN1 pini D4pinine, IN2 pini D3 pinine, IN3 pini D2 pinine, IN4 pini D1 pinine bağlanması ve step motora önce 5000 adım daha sonra ters yönde 5000 adım attırılması kodlanmıştır.ULN2003 Step Motor Sürücü ModülüArduino Uno BreadboardIN14IN23IN32IN41Örnek Proje Arduino Kodu/* ALPGEN Robotics */ // Step Motor Sürücü Modül Kullanımı // 08.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com //#include <Arduino.h> #include <StepperMotor.h> StepperMotor::StepperMotor(int In1, int In2, int In3, int In4){ // Record pin numbers in the inputPins array this->inputPins[4] = In1; this->inputPins[3] = In2; this->inputPins[2] = In3; this->inputPins[1] = In4; // Iterate through the inputPins array, setting each one to output mode for(int inputCount = 0; inputCount < 4; inputCount++){ pinMode(this->inputPins[inputCount], OUTPUT); } duration = 50; } void StepperMotor::setStepDuration(int duration){ this->duration = duration; } void StepperMotor::step(int noOfSteps){ /* The following 2D array represents the sequence that must be used to acheive rotation. The rows correspond to each step, and the columns correspond to each input. L */ bool sequence[][4] = {{LOW, LOW, LOW, HIGH }, {LOW, LOW, HIGH, HIGH}, {LOW, LOW, HIGH, LOW }, {LOW, HIGH, HIGH, LOW}, {LOW, HIGH, LOW, LOW }, {HIGH, HIGH, LOW, LOW}, {HIGH, LOW, LOW, LOW }, {HIGH, LOW, LOW, HIGH}}; int factor = abs(noOfSteps) / noOfSteps; // If noOfSteps is +, factor = 1. If noOfSteps is -, factor = -1 noOfSteps = abs(noOfSteps); // If noOfSteps was in fact negative, make positive for future operations /* The following algorithm runs through the sequence the specified number of times */ for(int sequenceNum = 0; sequenceNum <= noOfSteps/8; sequenceNum++){ for(int position = 0; ( position < 8 ) && ( position < ( noOfSteps - sequenceNum*8 )); position++){ delay(duration); for(int inputCount = 0; inputCount < 4; inputCount++){ digitalWrite(this->inputPins[inputCount], sequence[(int)(3.5 - (3.5*factor) + (factor*position))][inputCount]); } } } } ..
Sepete Ekle

HC-05 BLUETOOTH MODÜLÜHC05 Bluetooth-Serial Modül Kartı, Bluetooth SSP(Serial Port Standart) kullanımı ve kablosuz seri haberleşme uygulamaları için tasarlanmıştır. Hızlı prototiplemeye imkan sağlaması, breadboard, arduino ve çeşitli devrelerde rahatça kullanılabilmesi için gerekli pinler devre kartı sayesinde dışarıya alınmıştır. Çoğu bluetooth modülden farklı olarak master modunu da desteklemektedir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde akıllı ev, uzaktan kontrol edilebilir robot vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı DijitalEn23.75mmBoy65.56mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede bluetooth modülünden gelen veriye göre kart üzerindeki dijital 13 pinine bağlı olan LED yanacaktır. Modülden gelen değer "up" ise LED yanacak, "down" ise LED sönecektir.HC-05 Bluetooth ModülüArduino Uno BreadboardRXD1TXD0-GND+5VÖrnek Proje Arduino Kodu /* ALPGEN Robotics */ //* Bluetooth Modülü Kullanımı // 22.06.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// String data; // String türünde data isimli değişkeninin tanımlanması int led = 13; void setup() { pinMode(led, OUTPUT); //Durum ledi çıkış olarak ayarlandı Serial.begin(9600); } void loop() { while(Serial.available() > 0) // bağlantı kuruluyken { delay(10); // 10ms zaman gecikmesi char c = Serial.read(); // gelen veriyi karakterlere bölmek için c adında karakter tanımlıyoruz data += c; // String türündeki data değişkenimiz karakterlerin toplamına eşitlendi } if(data.length() >0) // gelen verinin uzunluğu 0 dan büyükse { if(data == "up") // eğer gelen veri "up" ise { digitalWrite(13,1); // Durum ledini yak } if(data == "down") // eğer gelen veri "down" ise { digitalWrite(13,0); //Durum ledini söndür } } data = ""; // gelen veriyi sıfırla } ..
Sepete Ekle

PİEZO ELEKTRİK MODÜLÜ Piezoelektrik Sensör Modülü, basıncı veya gerilimi ölçer. Basınç oluşturulduğunda elektrik üreten yarı iletken bir sensördür. Sürekli enerji üretimi olması için uygulanan basıncın sürekli değişken olması gerekmektedir. Basınç algıladığında analog çıkış verir.Nerede Kullanılır?Arduino ile robotik kodlama projelerinde veya STEM uygulamalarında piezo disk ile elektrik üretim projeler yapabilirsiniz.Çalışma Voltajı5V DCData Çıkışı AnalogEn29.24mmBoy44.78mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede, modülümüzün data pininin analog 0 pinine bağlanması ve okunan değere göre LEDin yanması kodlanmıştır. Projede piezo elektrik modülü ile Arduino Uno Breadboard kullanılmıştır.Piezoelektrik ModülüArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu /* ALPGEN Robotics */ // Piezo Modülü Kullanımı // 08.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int sensorpin = A0; // Sensor Analog 0'a tanımlandı int led = 13; // Durum ledi dijital 13'e tanımlandı int sensordeger = 0; //Sensor degeri için değişken tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 Baudrate ayarlandı } void loop() { sensordeger = analogRead(sensorpin); //Analog pinden okunan sensor degeri sensordeger'e kaydedildi if (sensordeger > 20) //Eğer sensor degeri 20'den büyükse { digitalWrite(led, 1); //Ledi yak } else // Değilse { digitalWrite(led, 0); //Ledi söndür } Serial.println(sensordeger); // Seri monitöre sensordeger'ini yazdır delay(100); //100mslik gecikme süresi } ..
Sepete Ekle

VOLTAJ SENSÖR MODÜLÜVoltaj ölçüm sensörü modülü, voltaj ölçebilen sensör modülüdür. Ölçtüğü değerlere göre analog çıkış verir. 0-5V analog giriş aralığı ile 25V'a kadar bir voltajı voltaj sensör modülü ile ölçebilirsiniz.Nerede Kullanılır?Arduino robotik kodlama projelerinde voltaj ölçme uygulamalarında kullanabilirsiniz.Çalışma Voltajı5V DCData Çıkışı AnalogEn29.24mmBoy55.22mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede voltaj ölçüm sensörü modülü A3 pininden karta bağlanacak ve ölçtüğü voltajı 2'şer saniye arayla ekrana yazdıracaktır.Bu projede voltaj ölçüm sensörü modülü;Voltaj Ölçüm Sensör ModülüArduino Uno BreadboardDATAA3-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics */ // Voltaj Ölçüm Sensör Modülü Kullanımı // 15.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // int volpin = A3; // Voltaj Ölçüm sensörünü A0 pinine tanımlıyoruz int deger = 0; // voltaj ölçüm başlangıç değeri 0 tanımlandı int led = 13; // led Dijital 13'e tanımlandı void setup() // Başlangıç Ayarlamaları { pinMode(led, OUTPUT); // led çıkış olarak ayarlandı Serial.begin(9600); // Seri haberleşme hızı 9600 baudrate ayarlandı } void loop() // Sürekli Tekrar Edecek Olan Döngü { deger = analogRead(volpin); // Modülden okunan değer "deger" değişkenine atandı if (deger > 800) //Eğer okunan değer 800'den büyükse { digitalWrite(led, HIGH); // led yansın } else // değilse { digitalWrite(led, LOW); // led sönsün } Serial.println(deger); // Okunan değer seri monitörde mesaj olarak gönderilir delay(100); // 100ms gecikme }..
Sepete Ekle

SHT31 SICAKLIK VE NEM SENSÖR MODÜLÜSHT31 sıcaklık ve nem sensör modülü, I2C protokolü ile haberleşen sensördür. Sıcaklık ve nem değerini %2 hassasiyet ile ölçmektedir. 2.4V ve 5.5V aralığında çalışmaktadır. Ölçtüğü değere göre dijital çıkış verir. Nerede Kullanılır?Arduino ile robotik kodlama projelerinde sıcaklık ve nem ölçümü yapılan, akıllı tarım vb. projelerde kullanılabilir.Çalışma Voltajı5V DCData Çıkışı DijitalEn32.45mmBoy74.87mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede SHT31 sıcaklık ve nem sensörü modülünün ölçtüğü değerler 1 saniye aralıklarla seri porta yazdırılacaktır.Bu projede SHT31 sıcaklık ve nem sensör modülü;SHT31 Sıcaklık Ve Nem Sensör ModülüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // SHT31 Sıcaklık ve Nem Sensörü Kullanımı // 06.08.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com */ #include <Wire.h> // SHT31 I2C address is 0x44(68) #define Addr 0x44 void setup() { // Initialise I2C communication as MASTER Wire.begin(); // Initialise serial communication, set baud rate = 9600 Serial.begin(9600); delay(300); } void loop() { unsigned int data[6]; // Start I2C Transmission Wire.beginTransmission(Addr); // Send 16-bit command byte Wire.write(0x2C); Wire.write(0x06); // Stop I2C transmission Wire.endTransmission(); delay(300); // Start I2C Transmission Wire.beginTransmission(Addr); // Stop I2C Transmission Wire.endTransmission(); // Request 6 bytes of data Wire.requestFrom(Addr, 6); // Read 6 bytes of data // temp msb, temp lsb, temp crc, hum msb, hum lsb, hum crc if (Wire.available() == 6) { data[0] = Wire.read(); data[1] = Wire.read(); data[2] = Wire.read(); data[3] = Wire.read(); data[4] = Wire.read(); data[5] = Wire.read(); } // Convert the data int temp = (data[0] * 256) + data[1]; float cTemp = -45.0 + (175.0 * temp / 65535.0); float fTemp = (cTemp * 1.8) + 32.0; float humidity = (100.0 * ((data[3] * 256.0) + data[4])) / 65535.0; // Output data to serial monitor Serial.print("Temperature in Celsius :"); Serial.print(cTemp); Serial.println(" C"); Serial.print("Temperature in Fahrenheit :"); Serial.print(fTemp); Serial.println(" F"); Serial.print("Relative Humidity :"); Serial.print(humidity); Serial.println(" %RH"); delay(500); }..
Sepete Ekle Sensör Modülü")
 Sensör Modülü")
BUHAR ( VAPOR ) SENSÖR Buhar Sensörü modülü, dijital bir sensördür. Üzerindeki nemin artıp azalması ile doğru orantılı çalışır. Nemli bir ortamda veya yağmur damlalarının düşmesinden kaynaklı, nemlilik oranının seviyesine göre bir artış göstererek değer üretir. Nerede Kullanılır?Arduino projelerinde nem ölçüm uygulamalarında kullanılabilir.Çalışma Voltajı5V DCData Çıkışı DijitalEn36.27mmBoy53.2mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede buhar vapor sensör modülünün nemden okuduğu değere göre seri monitöre yazdırcaktır. Projede nem ölçüm sensörü ile Arduino Uno Breadboard kullanılmıştır.Buhar ( Vapor ) SensörArduino Uno BreadboardDATAA0-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // Buhar (Vapor)Sensörü Kullanımı // 09.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // */ void setup() { Serial.begin(9600); } void loop() { int val; val = analogRead(A0); Serial.print("Sunemi: "); Serial.println(val,DEC); delay(150); } ..
Sepete Ekle

YAĞMUR SENSÖRÜYağmur Sensörü modülü, yağmur ve su damlası ölçümü için kullanılan bir modüldür. Modül dijital ve analog çıkış vermektedir. Bu modül ile yağmur şiddetini veya yağıp yağmadığını ölçebilirsiniz.Nerede Kullanılır?Arduino robotik kodlama projelerinde akıllı ev gibi projelerde yağmur sensörü olarak kullanılabilir. Çalışma Voltajı5V DCData Çıkışı Analog - DijitalEn54.7mmBoy64.90mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede yağmur sensörümüzün üzerine su geldiğinde eşik değerini geçtiyse eğer D13 pinine bağlı ledi yakacağız. Yağmur SensörüArduino Uno BreadboardDATAD5-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // M014 Yağmur Sensör Modülü // 09.05.2021 // Soru ve yardım için: proje@alpgenrobotics.com // www.alpgenrobotics.com // */ int sensorPin = A0; int esikDegeri = 900; int led = 13; int veri; void setup() { pinMode(led, OUTPUT); Serial.begin(9600); } void loop() { veri = analogRead(sensorPin); if (veri < esikDegeri) { digitalWrite(led, HIGH); delay(100); digitalWrite(led, LOW); delay(100); } else { digitalWrite(led, LOW); } Serial.println(veri); delay(200); }..
Sepete Ekle

HALL EFFECT MANYETİK SENSÖRHall Effect Sensör, manyetik cisimleri algılayarak çalışır. Etrafındaki manyetik alanın şiddetine göre değer verir. Mıktanıs vb. manyetik materyaller sensöre yaklaştığında çıkış vermektedir.Nerede Kullanılır?Arduino ile robotik kodlama uygulamarında kullanabilirsiniz. Manyetik sensör mıknatıs gibi manyetik cisimlere karşı çıkış vermektedir. Sensörün ön kısmına mıknatıs yaklaştırdığınızda sensör çıkış vermektedir. Arduino ile manyetik alan projelerinde hall effect sensör kullanabilirsiniz.Çalışma Voltajı5V DCData Çıkışı AnalogEn30.55mmBoy53.14mmVida Delik Çapı3.2mmÖrnek Proje Devre ŞemasıBu projede hall effect manyetik sensör etrafındaki manyeitk alan şiddetine göre kodlanmıştır. Kartın 9 numaralı dijital pinine bağlı olan hall effect manyetik sensör çıkışı Arduino Serial ekranına yazdırılacaktır.Hall Effect Manyetik SensörArduino Uno BreadboardDATAD9-GND+5VÖrnek Proje Arduino Kodu/* ALPGEN Robotics // Hall effect sensor modülü Kullanımı // 09.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com // */ int hallSensorPin = 9; int ledPin = 13; int state = 0; // void setup fonksiyonu LED ve Hall Sensörün bağlı olduğu pinleri tanımlıyoruz. void setup() { pinMode(ledPin, OUTPUT); pinMode(hallSensorPin, INPUT); } // void loop ile state de tuttuğumuz değeri okuyoruz ve duruma göre LED'in açılıp // kapanmasını sağlıyoruz. void loop(){ state = digitalRead(hallSensorPin); if (state == LOW) { digitalWrite(ledPin, HIGH); } else { digitalWrite(ledPin, LOW); } }..
Sepete Ekle

CocoBoard nedir? CocoBoard özellikle 8 yaş ve üzeri robotik kodlamaya yeni kullanıcılar için tasarlanmıştır; 2 düğme, 2 RGB led, LDR ışık sensörü ve DS18B20 sıcaklık sensörü dahili olarak Arduino tabanlı; arduino, mBlock gibi açık kaynaklı programlarla kodlanabilen bir robotik kodlama panelidir.Kimler kullanabilir ?8 ve üzeri her kişi cocoboard'u kolayca kullanabilir. Bugün kullanılan robotik kodlama setlerinin çoğu elektrik devresi bilgisine ihtiyaç duyar ve kullanıcıların kablo dağınıklığına sahip olmasına neden olur. CocoBoard üzerindeki yerleşik breadboard, sensörler ve modüller sayesinde, elektrik devresi bilgisi gerektirmez ve robotik kodlama projelerinin kablo karışıklığı olmadan gerçekleştirilmesini sağlar.Nasıl kullanılır?Bilgisayardaki USB portu ile bilgisayara bağlanır. Hazırlanan kod bloğu/hattı, USB bağlantısı yapıldıktan sonra karta yüklenir. Devre bağlantıları tamamlandıktan sonra, proje devreyi çalıştırarak gözlemlenir.Nasıl kodlanmış?CocoBoard üzerindeki mikroişlemci sayesinde, bilgisayarda kolayca kodlanabilir. Ortak kodlama platformları ile uyumludur. Hem Arduino IDE hem de blok tabanlı kodlama platformlarından C ile kodlanabilir.Arduino IDE ile c-tabanlı kodlamaArduino Arduino IDE denilen kodlama platformu ile kullanılır. Robotik kodlama ürünlerinin çoğu Arduino ile kodlanabilir. C diline dayalı bu kodlama platformunda, cihaz tipi Arduino uno'yu seçerek istediğiniz gibi cocoboard'u kodlayabilirsiniz.MBlock ile blok tabanlı kodlamaMBlock, blok tabanlı kodlama için açık kaynaklı bir platformdur. Bu platform, sürükle-drog kodlama yapısı sayesinde çok genç bireylerin bile kullanabileceği bir seviyeye kodlama getirdi. Bu şekilde, çocuklar 5-6 yaşında yazılım ve algoritma geliştirmeye başlayabilir. Ayrıca, mBlock türkçe de dahil olmak üzere birçok dili destekler.Arduino uno'nun kod bloklarını kullanarak veya ALPGEN robotik tarafından geliştirilen kod bloklarını kullanarak mBlock üzerinden CocoBoard kodlayabilirsiniz. Platformu açtıktan sonra, “cihaz ekle” düğmesini kullanarak cocoboard'u seçebilirsiniz.CocoBoard ile ne yapılabilir?CocoBoard, hem düğmeler hem de sensörler üzerinde bulunan birçok proje için geliştirmeye açık bir üründür ve harici olarak eklenebilen sensörler ve modüller ile. Örneğin;2 x Buton: Düğmeler devrede anahtar olarak hareket eder. Basıldığında 1 dijital çıktı ve diğer durumlarda 0 verir. Düğme ile RGB led'lerini yanıp söyebilir ve hatta RGB led'lerinin renklerini değiştirebilirsiniz. Düğmeleri harici olarak cocoboard'a bağlanacağınız sensörler ve modüller ile kolayca kullanabilirsiniz.2 x RGB Led:RGB led'leri, renk ölçeğinin her gölgesinde renk elde etmek için birincil renkleri (kırmızı, yeşil, mavi) karıştırır. Böylece, istediğiniz her renk için ayrı bir LED kullanmak yerine, herhangi bir kablo olmadan pratik olarak cocoboard'un yerleşik RGB led'lerini kullanabilirsiniz. Sensörler ve düğmeler ile yüzlerce farklı projeyi veya harici sensörleri ve modülleri cocoboard'a bağlayarak gerçekleştirebilirsiniz.DS18B20 Sıcaklık Sensörü: DS18B20 sıcaklık sensörü, bulunduğu ortamın sıcaklığını ölçen hassas bir sensördür. Ölçtüğü sıcaklık değerine göre 0 ile 1023 arasında farklı analog çıkışlar verir. Sıcaklık sensörünüzden seri bağlantı noktasına ölçtüğünüz değeri yazdırabilir ve RGB led'lerinin rengini ölçtüğünüz değere göre değiştirebilirsiniz. Ayrıca, sıcaklık sensörünü harici sensörler ve modüller ile cocoboard'a bağlayarak yüzlerce farklı projeyi gerçekleştirebilirsiniz.LDR Işık Sensörü: LDR ışık sensörü, üzerine düşen ışığın yoğunluğunu ölçer. Ölçtüğü ışık yoğunluğuna göre 0 ile 1023 arasında farklı analog çıkışlar verir. CocoBoard ve harici sensörler ve modüllerde hem dahili RGB led'leri ile LDR kullanarak, akıllı lambalar, akıllı evler vb. Oluşturmak için kullanılabilir. Yüzlerce farklı projeyi gerçekleştirebilirsiniz.I/O Pimleri: I/O pimleri giriş ve çıkış pimleridir. Kartın veri girişi-çıkışı bu pinlerden sağlanır. Birçok harici sensör ve modül, dijital ve analog pin girişleri ile cocoboard'a bağlanabilir. CocoBoard, ALPGEN robotik tarafından geliştirilen sensör modülleri ve Arduino için geliştirilen tüm sensörler ve modüller ile uyumludur. CocoBoard üzerinde dahili olarak mevcut olmayan I/O pimleri ve sensörleri ve modülleri kullanarak yüzlerce farklı projeyi gerçekleştirebilirsiniz...
Sepete Ekle

Çalışma Gerilimi: 3-12V/DCRedüksiyon Oranı: 1:48Hız: 250 Rpm (Maks.)Akım: 95mA (maks. 160mA)..
Sepete Ekle

MPU6050 GYRO SENSÖRKart üzerinde voltaj regulatörü bulunduğundan 3 ile 5 V arası bir besleme voltajı ile çalıştırılabilir. İvme ölçer ve gyro çıkışlarının her ikisi de ayrı kanallardan I²C çıkışı vermektedir. Her eksende 16 bitlik bir çözünürlükle çıkış verebilmektedir. Nerede Kullanılır?MPU-6050 çeşitli hobi, multicopter ve robotik projelerinde sıklıklı kullanılan üzerinde 3 eksenli bir gyro ve 3 eksenli bir açısal ivme ölçer bulunduran 6 eksenli bir IMU sensör kartıdır.Çalışma Voltajı5V DCData Çıkışı DijitalAçısal İvme Ölçüm Aralığı± 2 ± 4 ± 8 ± 16 gGyro Ölçüm Aralığı+ 250 500 1000 2000 ° / sVida Delik Çapı30.21mmBoy45,10mmVida Delik Çapı3,2mmÖrnek Proje Devre ŞemasıBu projede MPU6050 ivme sensör modülünü kullanarak modülün anlık olarak ölçtüğü X,Y,Z ve ivme değerlerini okuyup Arduino'nun seri monitöründen inceleyeceğiz. Projede MPU6050 ivme sensörü ile Arduino Uno Breadboard kullanılmıştır.MPU6050 İvme SensörüArduino Uno Breadboard-GND+5VSDAD5SCLD6Örnek Proje Arduino Kodu /* ALPGEN Robotics */ //* Potansiyometre Modülü Kullanımı // 15.05.2021 // Soru ve Yardım İçin: proje@alpgenrobotics.com // www.alpgenrobotics.com *// #include "I2Cdev.h" //I2C kütüphanesi #include "MPU6050.h" //Mpu6050 kütüphanesi #include "Wire.h" MPU6050 accelgyro; // Mpu6050 sensör tanımlama int16_t ax, ay, az; //ivme tanımlama int16_t gx, gy, gz; //gyro tanımlama void setup() { Wire.begin(); Serial.begin(38400); Serial.println("I2C cihazlar başlatılıyor..."); accelgyro.initialize(); Serial.println("Test cihazı bağlantıları..."); Serial.println(accelgyro.testConnection() ? "MPU6050 bağlantı başarılı" : "MPU6050 bağlantısı başarısız"); } void loop() { accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // ivme ve gyro değerlerini okuma //Açısal ivmeleri ve Gyro Değerlerini ekrana yazdırma Serial.print("a/g:\t"); Serial.print(ax); Serial.print("\t"); Serial.print(ay); Serial.print("\t"); Serial.print(az); Serial.print("\t"); Serial.print(gx); Serial.print("\t"); Serial.print(gy); Serial.print("\t"); Serial.println(gz); } ..
Sepete Ekle-334x334.jpg "Krokodil Kablo Set 10'lu")
Her elektronik atölyesinde bulunması gereken ürünlerdendir. Elektronik devrelerde sinyal ve güç iletimini çok kolaylaştırmaktadır. Set içeriğinde 10 adet 50cm krokodil kablo bulunmaktadır...
Sepete Ekle

Robotik projelerinizde rahatlıkla kullanabileceğiniz bu tekerler DC çift eksenli TT dişli motor ile uyumludur.Bu tekerleri çizgi izleyen, engelden kaçan veya bluetooth kontrollü robot gibi birçok robotik projede kullanabilirsiniz...
Sepete Ekle
Jumper Kablo Seti bir çok test projesinde, daha kolay ve daha hızlı işlem yapabilmek için tasarlanmış bir üründür. Ürün 20cm uzunluktaki birbirlerine yapışık 10 parça erkek-erkek jumper kablodan oluşmaktadır. ..
Sepete Ekle


Örümcek Robot, mBlock ve Arduino IDE'den kodlanabilir. Örümcek Robot, 3D Yazıcılar ile üretilmiş plastik parçalardan oluşmaktadır. Arduino veya Raspberry gibi ürünler ile kodlama ve robotik öğrenirken kendi robotunuzu tasarlamanıza yarar. Set İçeriği 1 x 3D Alt Şase 1 x 3D Üst Şase 2 x 3D Sağ Ayak 2 x 3D Sol Ayak 4 x 3D Bacak 2 x 3D SG90 Servo Motor Tutacağı Sağ 2 x 3D SG90 Servo Motor Tutacağı Sağ 8 x 3D Dirsek 4 x M3 30MM Vida 4 x M3 Somun 16 x M2 10MM Vida Montaj Kılavuzu Saklama Kutusu NOT : Elektronik komponent içermez. Stok durumuna göre 3d parçalarda renk değişikliği gösterilebilir. ..
Sepete Ekle

Birçok robot projenizde kullanılabilen bu teker, M3 vida delikleri sayesinde robotunuzun gövdesine veya farklı ortamlara kolayca sabitlenebilir. Bilyesi metal olup, bilye kısmının çapı 15mm'dir...
Sepete Ekle

Kar Board Arduino Kodlama Seti Nedir?Kar Board, Arduino tabanlı robotik ve kodlama öğrenmeyi kolaylaştıran eğitici kodlama setidir. Kar Board robotik kodlamaya yeni başlayacaklar için oldukça kullanışlı bir settir çünkü üzerindeki dahili bir çok sensör modülü sayesinde elektrik devresi kurmanız gerekmez. Robotik kodlamaya yeni başlayan bireyler Arduino ile eğitimlerde komponentleri ve elektrik devre kurmasını bilmeleri gerekmektedir. Çünkü devre kurarak kodunuzu deneyebilirsiniz. Kar Board bu zorluğu ortadan kaldırır ve çok hızlı bir şekilde ister Arduino IDE ile ister mBlock'ta sürükle-bırak kodlama ile algoritma geliştirmenizi sağlar.Kar Board ile Arduino'nun Farkları ve Benzerlikleri Neler?Benzerlikler:İkisi de robotik kodlama öğrenmek için uygun setlerdir,Kar Board, Arduino Uno gibi kodlanabilmektedir. Kar Board, Arduino Uno'nun kodlanabildiği tüm dillerde ve platformlarda kodlanabilir,Kar Board pin dizilimi Arduino Uno ile benzer olduğu için Arduino Shieldlerini Kar Board ile kullanabilirsiniz,Farklar:Kar Board tümleşik yapısı sayesinde elektrik devre bilgisi gerektirmezken Arduino'da bilmeniz gerekir,Kar Board için geliştirilen mBlock eklentileri sayesinde çok daha basit kodlama öğrenebilirsiniz,Kar Board üzerinde dahili mini breadboard bulundurur. Bu sayede devre kurmayı kolaylaştırır,Kar Board 2 yıl garantili olarak satışa sunulmaktadır. Arduino klon ürünlerinde garanti bulunmamaktadır,Yukarıda ki karşılaştırmada Kar Board ve Arduino Uno ile buton ile led yakma devre farkı gösterilmiştir. Arduino Uno kullanılan devrede 5 adet kablo ve 4 adet komponent kullanılmıştır. (2 adet direnç, buton ve led) Kar Board devresinde ise buton ve led komponentleri dahili olarak bulunduğu için 2 adet jumper kablo kullanmak yeterlidir.Kar Board Proje KitapçığıKar Board için hazırlamış olduğumuz 8 projelik proje dokumanını buradan indirebilirsiniz.Kar Board Videolu Eğitim SerisiKar Board için hazırlamış olduğumuz 5 derslik kodlamaya giriş eğitimimizden ücretsiz olarak faydalanabilirsiniz. YouTube eğitim serisine buradan ulaşabilirsiniz: Kar Board Eğitim Serisi - YouTubeKar Board Arduino Kodlama Seti İçeriği:Kar Board Kodlama Kartı10x Dişi-Erkek Jumper KabloUSB Kablo..
Sepete Ekle

3D Printer ile PLA malzemeden üretilmiş Otto Robot seti ile Arduino projeleri geliştirebilirsiniz. Otto dans edip yürüyebilir!Otto Robot İçin Gerekli Malzemeler:Arduino NanoArduino Nano Sensor Shield4 Adet SG90 Servo BuzzerOn / Off SwitchUltrasonik Sensör HC-SR04Pil (Lipo tavsiye edilir)Otto Robot Set İçeriği:Otto Robot 3D Baskı Gövde Seti (Stok durumuna göre renk farklı olabilir)Montaj KılavuzuNot: Sete motor, pil vb. elektronik malzemeler dahil değildir. Full set için mağazamızı ziyaret edebilirsiniz...
Sepete Ekle

CATBOT Robot SetiCatBot üzerinde Catduino geliştirme kartı bulunan genel amaçlı robotik kodlama setidir. Arduino uyumlu yapısı sayesinde robotik kodlama başlangıç ve ileri eğitimlerinde tercih edilebilir. Ayrıca Catduino için geliştirdiğimiz mBlock eklentileri sayesinde CatBot ile robot geliştirmek oldukça basit!mBot'a benzer yapısı sayesinde kullanmakta zorluk yaşamayacağınız bu set ile elinizde bulunan Arduino vb. projelerde kullandığınız tüm sensör ve modülleri CatBot üzerinde rahatlıkla kullanabilirsiniz. CatBot için özel sensör veya modül almanız gerekmez.CATBOT ile Neler Yapılabilir?CatBot'un set içeriğindeki malzemeler ile Otonom RobotEngelden Kaçan RobotÇizgi İzleyen RobotBluetooth Kontrollü Robot Yapılabilmektedir.CATBOT Mobil UygulamasıCatBot için hazırlamış olduğumuz Android uygulama ile CatBot'u akıllı telefonunuzdan yönetebilirsiniz. Bunun için yapmanız gerekenler;Örnek projeler kılavuzunda bulunan 3. proje Bluetooth Kontrollü Robot Projesini mBlock ile oluşturun ve Catduino'ya yükleyin. Kod yükleme işlemi gerçekleştirilirken Bluetooth modülünün Catduino'ya takılı olmamasına dikkat edin. Aksi halde kod yüklenmeyecektir. Kod yüklendikten sonra Bluetooth modülünü Catduino'ya takın ve Catduinonun pillerini takarak CatBot'u çalıştırın. Bluetooth modününün ışığı sürekli olarak yanıp sönüyor olacaktır. Bu durum herhangi bir cihaza bağlı olmadığını göstermektedir.CatBot çalışıyorken telefonunuzun ayarlarından bluetooth'a girin. Yakın çevredeki bluetooth cihazları listelenecektir. Listenin son halini alması için birkaç dakika bekleyin. HC-05 cihazı çıktığında üzerine tıklayın ve eşleşme gerçekleştirin. Eşleşme sırasında parola isteyecektir. Parola genellikle 12345 veya 0000 olmaktadır.Eşleşme yapıldıktan sonra yüklemiş olduğumuz Android uygulamayı açarak Bağlan butonuna tıklayın. Burada eşleşmiş olduğumuz cihazlar listelenecektir. Az önce eşleşmiş olduğumuz bluetooth aygıtına tıklayın ve bağlantı gerçekleştirin. Bağlantı kurulurken hata verirse tekrar deneyin. Bağlantı kurulduktan sonra yön komutları ile robotumuzu hareket ettirebiliriz. Ayrıca sesli komutlar ile de hareket ettirebiliriz.Mobil Uygulamayı Buradan İndirebilirsiniz.Örnek ProjelerÖrnek projeler dokümanını buradan indirebilirsiniz.CATBOT Set İçeriğiCatduino Geliştirme Kartı + USB KabloUltrasonik SensörBluetooth HC-05 Modülü3'lü Çizgi İzleyen Sensör + Sensör Tutucu2x 250rpm DC Motor2x Geçmeli TekerlekSarhoş TekerlekDişi-Erkek Jumper KabloAlüminyum Robot Gövdesi4x Aralayıcı2x 18650 1200mAh Batarya2'li Batarya YuvasıM3 Vida ve Somun SetiÖrnek Projeler Kitapçığı..
Sepete Ekleİlgili Yazılar

Kar Board: mBlock ile Buton Kullanımı
Bu uygulamada Kar Board kullanarak, Kar Board üzerinde bulunan dahili buton modülü ile D13 pininde b..
Daha Fazla
Kar Board: mBlock LDR Işık Sensörü
Bu uygulamada Kar Board üzerinde bulunan ışık sensörü ile değer okuyup Arduino IDE üzerinde gözlemle..
Daha Fazla
Kar Board: Ultrasonik Sensör Mesafe Ölçüm
Bu projede Kar Board ile ultrasonik sensörden okunan mesafe değerini Arduino IDE'nin seri ekranından..
Daha Fazla