Tarih: 19.07.2024 13:31
Engelden Kaçan Robot Nedir?
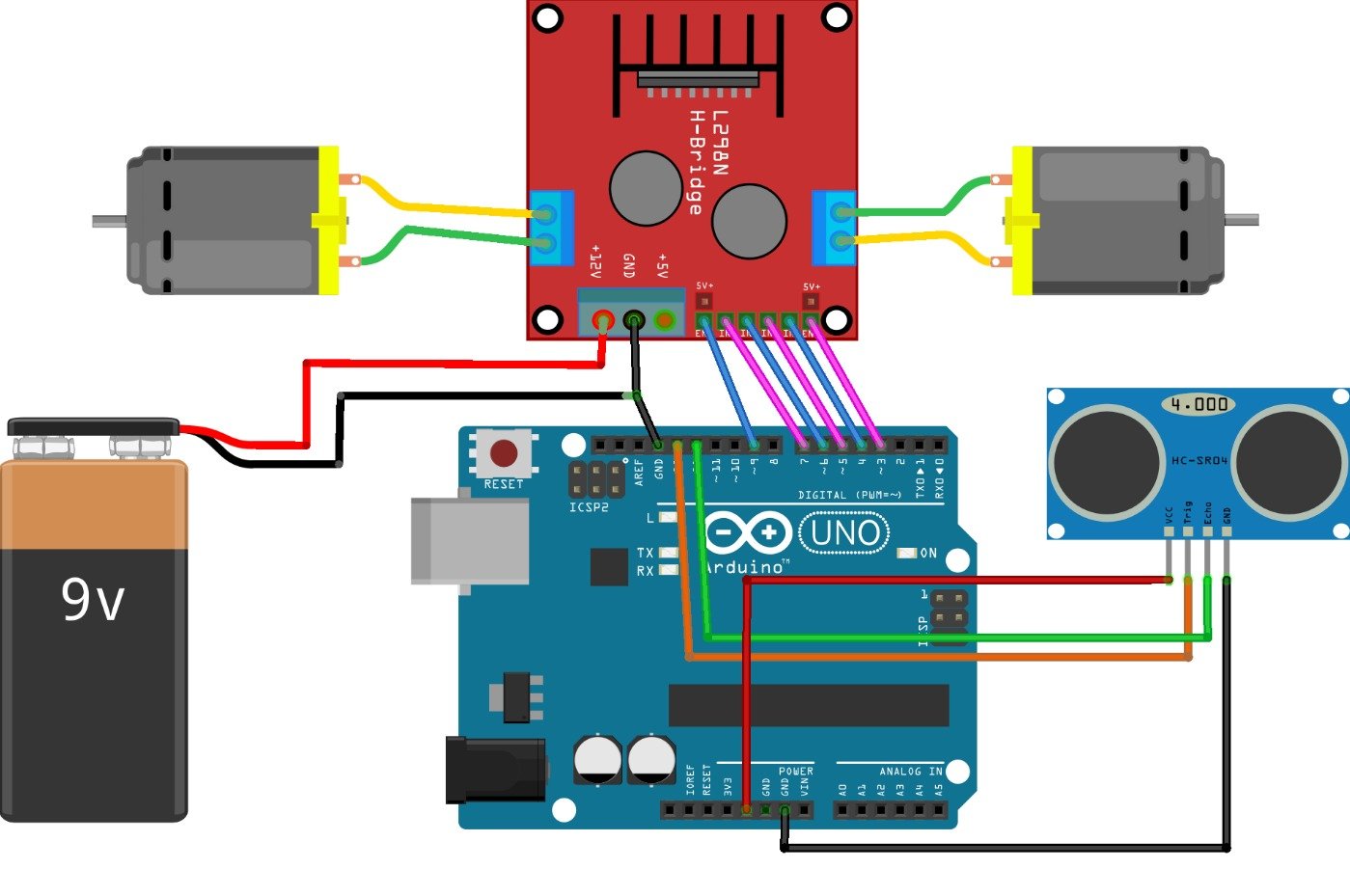
Engelden kaçan robot prensipte sürekli ileri yönde hareket edip engel gördüğü zaman yönünü değiştirerek engele çarpmadan ilerlemeye devam eden robottur. Engelden kaçan robot projelerinde sıklıkla Arduino Uno, HC-SR04 ultrasonik sensör ve genellikle L298N motor sürücü modülleri kullanılmaktadır.
Engelden Kaçan Robot Nedir?
Engelden kaçan robot prensipte sürekli ileri yönde hareket edip engel gördüğü zaman yönünü değiştirerek engele çarpmadan ilerlemeye devam eden robottur. Engelden kaçan robot projelerinde sıklıkla Arduino Uno, HC-SR04 ultrasonik sensör ve genellikle L298N motor sürücü modülleri kullanılmaktadır.
 Engelden Kaçan Robot Set İçeriği
Engelden Kaçan Robot Set İçeriği
Engelden Kaçan Robot Seti: Arduino Engelden Kaçan Robot Satın Al |ALPGEN Robotics
 DEVRE ŞEMASI
DEVRE ŞEMASI
Engelden Kaçan Robot Kodu:
Arduino kodlamak için Arduino IDE veya mBlock uygulamasını kullanabilirsiniz. L298 motor sürücü modülünü kullanmak için herhangi bir kütüphane kullanmanıza gerek yoktur.
#defineechoPin12//Ultrasonik sensörün echo pini Arduino'nun 12.pinine#definetrigPin13//Ultrasonik sensörün trig pini Arduino'nun 13.pinine tanımlandı.#defineMotorR17#defineMotorR26#defineMotorRE9 // Motor pinlerini tanımlıyoruz.#defineMotorL15#defineMotorL24#defineMotorLE3longsure,uzaklik;//süre ve uzaklık diye iki değişken tanımlıyoruz.voidsetup(){
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin,INPUT);
pinMode(trigPin,OUTPUT);
pinMode(MotorL1,OUTPUT);
pinMode(MotorL2,OUTPUT);
pinMode(MotorLE,OUTPUT);//Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1,OUTPUT);
pinMode(MotorR2,OUTPUT);
pinMode(MotorRE,OUTPUT);
Serial.begin(9600);}voidloop(){
digitalWrite(trigPin,LOW);//sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin,HIGH);//Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin,LOW);//Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure=pulseIn(echoPin,HIGH);//ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik=sure/29.1/2;//ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if(uzaklik<15)// Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else
{ // değil ise,
ileri();// ileri git
}}voidileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1,HIGH);// Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2,LOW);// Sağ motorun geri hareketi pasif
analogWrite(MotorRE,150);// Sağ motorun hızı 150
digitalWrite(MotorL1,HIGH);// Sol motorun ileri hareketi aktif
digitalWrite(MotorL2,LOW);// Sol motorun geri hareketi pasif
analogWrite(MotorLE,150);// Sol motorun hızı 150}voidsag(){// Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1,HIGH);// Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2,LOW);// Sağ motorun geri hareketi pasif
analogWrite(MotorRE,0);// Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1,HIGH);// Sol motorun ileri hareketi aktif
digitalWrite(MotorL2,LOW);// Sol motorun geri hareketi pasif
analogWrite(MotorLE,150);// Sol motorun hızı 150}voidgeri(){// Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1,LOW);// Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2,HIGH);// Sağ motorun geri hareketi aktif
analogWrite(MotorRE,150);// Sağ motorun hızı 150
digitalWrite(MotorL1,LOW);// Sol motorun ileri hareketi pasif
digitalWrite(MotorL2,HIGH);// Sol motorun geri hareketi aktif
analogWrite(MotorLE,150);// Sol motorun hızı 150}